Atividade #1126
FechadaTrabalho pré robocup
Adicionado por Nicolas Oliveira quase 7 anos atrás. Atualizado mais de 6 anos atrás.
Descrição
Essa tarefa irá descrever tudo feito por mim (nicolas) na véspera da competição para leitura dos outros membros.
Arquivos
{kind=link}
Atualizado por Nicolas Oliveira há quase 7 anos
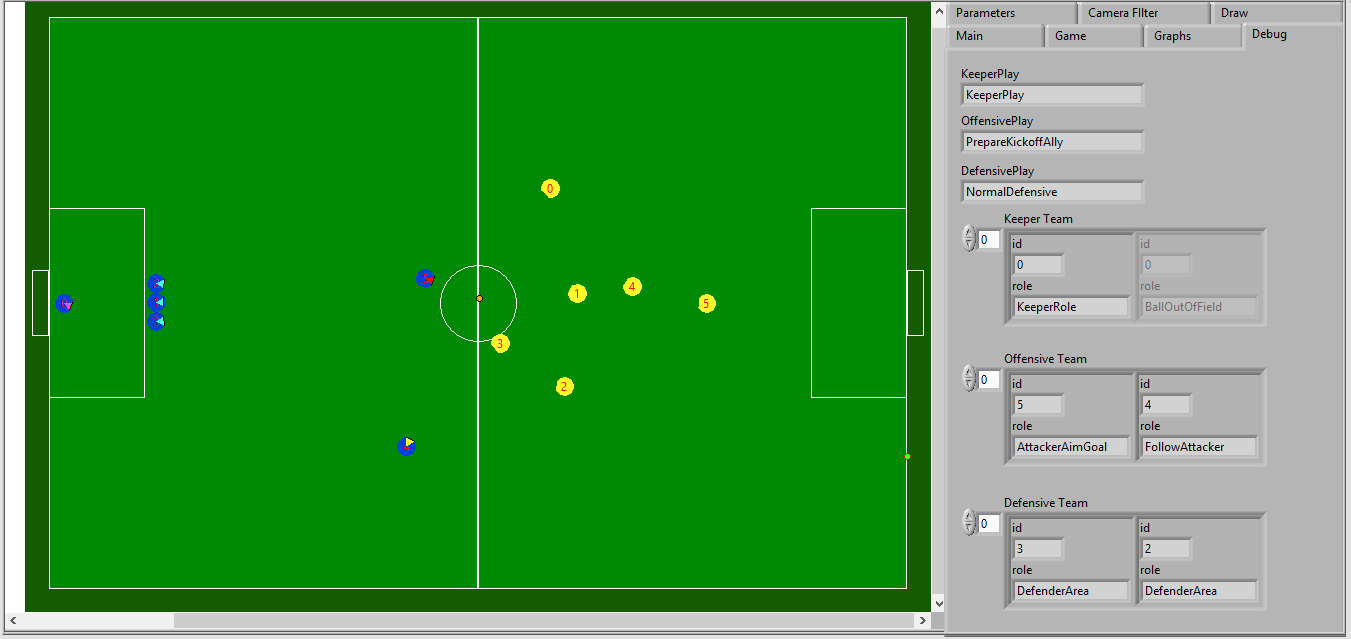
Primeiro ajeitei a escala inicial do desenho do campo, para que ele comece mostrando o campo como um todo. Além disse acomodei o front panel da phoenix.vi para caber na tela de um notebook.
Além disse coloquei um implementação de teste com o desenho do campo sendo passado por referência para outro while. Senti uma leve melhora no fps, mas acho válido ainda um teste em um pc melhor q o meu.
Atualizado por Nicolas Oliveira há quase 7 anos
Coloquei para gráficos com a velocidade dos robs fossem plotados na tela inicial. Mas por algum motivo os robôs ficaram com comportamento estranho quando ativa isso. Deixei desabilitado por enquanto.
Todo o trabalho esta sendo feito na branch PreRobocup!
Atualizado por Nicolas Oliveira há quase 7 anos
Há situações em que o best y está retornando um ponto fora do gol, esta situação deve ser tratada com antes era.
ex:

Atualizado por Nicolas Oliveira há quase 7 anos
Como n to conseguindo criar classes, criei apenas a skill do zigzag deixei salva no meu computador.
Atualizado por Nicolas Oliveira há quase 7 anos
Quando eu trocava o id do goleiro ele n se alterava. Descobri então q o id do goleiro n estava sendo passado do iastate para o game. Além disso na ordenação do vetor de allys o id do goleiro estava desconectado.
Criei um cluster para setar os parâmetros a partir da tela inicial para melhorar a organização do código.
Atualizado por Nicolas Oliveira há quase 7 anos
Coloquei a stp de zigzag, mas falta crias as VIs auxiliares na utilities e ligar os vetores de ids do zigzag na skill.
Atualizado por Nicolas Oliveira há quase 7 anos
Um problema atual é que no caso em que uma play, como por exemplo o zigzag escolhe apenas um robô, os outros deveriam ficar parados. Oq eu fiz foi colocar uma role none para todos os robôs inicialmente. Sendo assim agr basta adicionar esse case em todas as executePlays para garantir q nesse caso eles n façam nada.
Atualizado por Carla Cosenza há quase 7 anos
O best y não deveria retornar um ponto fora do gol, ele foi copiado do código antigo.
Atualizado por Rebeca Reis há quase 7 anos
Adicionei o atributo valid na classe da bola, que por default é false. Aí mudei o evento BallOutOfVision para verificar: se a bola está valid, então retorna false; se a bola está inválida, então o evento acusa que ela está fora da visão.
Falta testar se funciona, porque pelo grsim nao tem como colocar a bola fora da visão, além de que o grsim nao envia o pacote valid (só a visão), daí a bola está sempre falsa por default.
Atualizado por Rebeca Reis há quase 7 anos
Falta o case do halt (adicionar a role) na executeKeeperPlay
Atualizado por Rebeca Reis há quase 7 anos
Timeout terminado. Encontramos um bug! Quando troca o lado do campo, o desenho também troca (espelha).
Atualizado por Rebeca Reis há quase 7 anos
Halt feito. Germano ajeitou as plays no direct/indirect free ally, nosso robo agora já está indo chutar.
Atualizado por Lucas Germano há quase 7 anos
O problema no desenho do campo é que agora só temos uma referência para todos os dados, que é o Game, mas quando trocamos o lado, inverte-se a posição de todos os robôs e bola, por isso que o desenho fica invertido. Precisamos pensar numa forma de pegar os dados para o desenho antes dessa troca ser realizada ou fazer alguma função para verificar, no desenho do campo, em qual lado estamos jogando e assim desenhar de acordo.
Atualizado por Rebeca Reis há quase 7 anos
Situações em que vamos chutar alto:
- goleiro (sempre!)
- passe/indirect ally: o robo que for passar a bola pode ou nao chutar alto, dependendo se existe um robo inimigo na reta robo passador - robo recebedor
- direct ally: se for fazer o passe, mesmo critério de antes. Se for chutar direto pro gol, sem chute alto.
- duelist: chute alto sempre. Possivelmente podemos usar o mesmo critério de antes também
Atualizado por Gabriel Borges da Conceição há mais de 6 anos
- Situação alterado de Em andamento para Fechada