|
Relatorio_Parcial_Horie_2.pdf (867 KB)
Relatorio_Parcial_Horie_2.pdf |
|
Lucio Horie, 05/06/2024 22:38 h
|
|
|
Kalman Basics Theory.pdf (1 MB)
Kalman Basics Theory.pdf |
Aqui temos uma descrição sobre alguns filtros menos sofisticados que o Kalman. A ideia que esses filtros culminam no Kalman linear, que tem uma matemática mais robusta (bendita alg lin). |
Luiz Augusto Santos Ribeiro, 10/06/2024 02:41 h
|
|
|
kalman_filter_demo.m (4,07 KB)
kalman_filter_demo.m |
Código Simples do filtro Kalman, aplicado a um móvel num regime de MRUV. São medidas as posições em X e Y (geradas com erro Gaussiano) e aplicado o filtro Kalman |
Luiz Augusto Santos Ribeiro, 10/06/2024 03:03 h
|
|
|
plots.fig (107 KB)
plots.fig |
Plot das posições em X e Y medidas juntamente com as filtradas. Tem-se também velocidade em x/y e aceleração em x estimadas (estimation step). Referentes ao código Demo em matlab |
Luiz Augusto Santos Ribeiro, 10/06/2024 03:06 h
|
|
|
aceleração y.fig (22 KB)
aceleração y.fig |
Plot aceleração em y |
Luiz Augusto Santos Ribeiro, 10/06/2024 03:06 h
|
|
|
plots.png (106 KB)
plots.png |
|
Lucio Horie, 10/06/2024 19:30 h
|
|
|
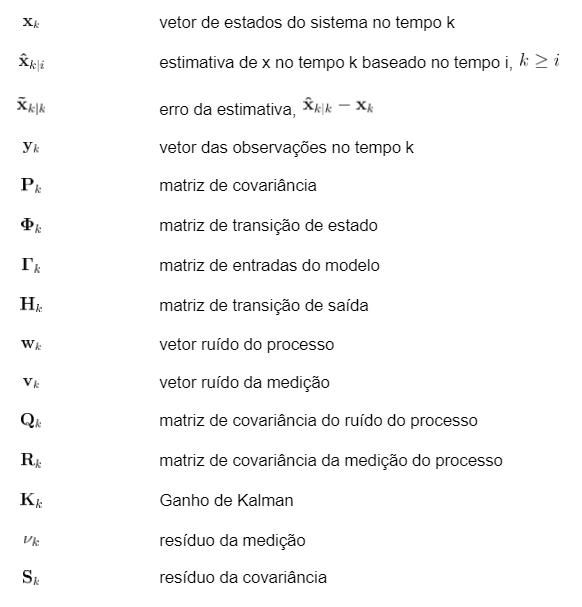
simbologia.png (35,6 KB)
simbologia.png |
|
Lucio Horie, 10/06/2024 19:51 h
|
|
|
imagem 2.png (10,7 KB)
imagem 2.png |
|
Luiz Augusto Santos Ribeiro, 19/06/2024 01:41 h
|
|
|
imagem 3.png (8,04 KB)
imagem 3.png |
|
Luiz Augusto Santos Ribeiro, 19/06/2024 01:41 h
|
|
|
imagem 1.png (228 KB)
imagem 1.png |
|
Luiz Augusto Santos Ribeiro, 19/06/2024 01:41 h
|
|
|
imagem 4.png (18,2 KB)
imagem 4.png |
|
Luiz Augusto Santos Ribeiro, 19/06/2024 01:41 h
|
|
|
imagem 5.png (52,8 KB)
imagem 5.png |
|
Luiz Augusto Santos Ribeiro, 19/06/2024 01:41 h
|
|
|
imagem 6.png (20,6 KB)
imagem 6.png |
|
Luiz Augusto Santos Ribeiro, 19/06/2024 01:41 h
|
|
|
imagem 7.png (25,6 KB)
imagem 7.png |
|
Luiz Augusto Santos Ribeiro, 19/06/2024 01:41 h
|
|
|
imagem 9.png (1,16 KB)
imagem 9.png |
|
Luiz Augusto Santos Ribeiro, 19/06/2024 01:41 h
|
|
|
imagem 8.png (70,7 KB)
imagem 8.png |
|
Luiz Augusto Santos Ribeiro, 19/06/2024 01:41 h
|
|
|
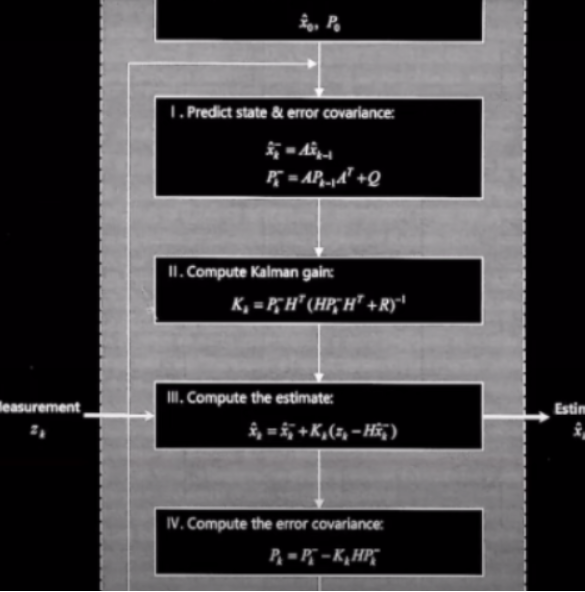
kalman uptade.png (2,41 KB)
kalman uptade.png |
|
Luiz Augusto Santos Ribeiro, 19/06/2024 01:41 h
|
|