Filtro de dados e estimadores » Histórico » Revisão 17
« Anterior |
Revisão 17/19
(diff)
| Próximo »
Lucio Horie, 19/06/2024 01:34 h
Filtro de dados e estimadores¶
- Kalman
Ola
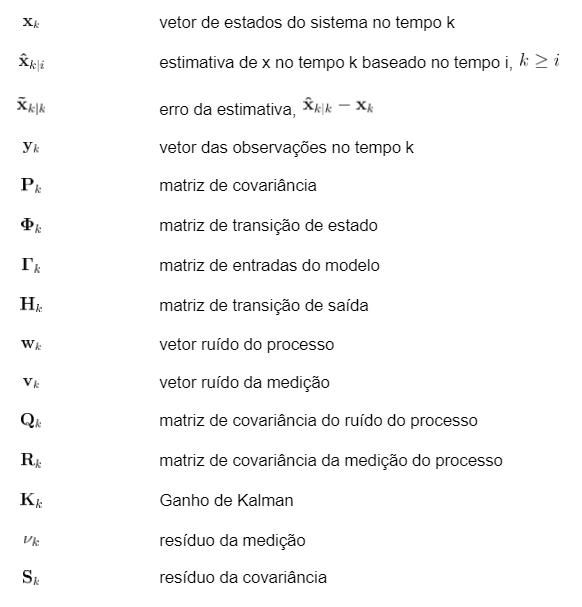
- Simbologia utilizada
Escrever algo aki

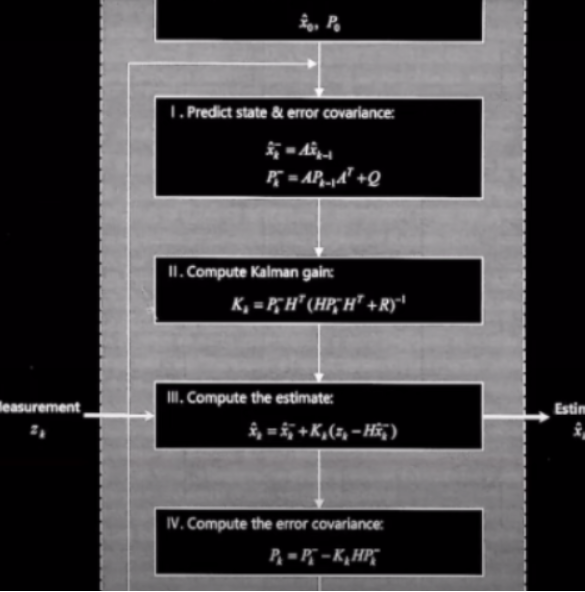
Na notação usual Zk é a k-ésima medição e ˆxk é a k-ésima estimativa. Perceba que a estimativa pode ser um estado diferente da medição, isto é, podemos por exemplo estar medindo a posição e estimando a velocidade, não precisam se tratar da mesma coisa, ai reside uma das vantagens inerentes ao filtro: ele não somente "filtra dados" ele também deriva variáveis não medidas a partir de um modelo (matriz A e Q). A princípio é difícil entender que diacho ta sendo expresso nesse diagrama. Vamos com calma, um passo de cada vez até o bendito Kalman. Temos no passo (I) uma etapa de predição (prediction), inclusive a notação embarca essa ideia, na notação usual é a previsão de estado k baseada na k-1, o "-" na notação quer dizer previsão,
Atualizado por Lucio Horie há aproximadamente 2 anos · 17 revisões