Ações
Atividade #998
AbertaModelagem do sistema dinâmico do robô
Descrição
Definir como será o sistema dinâmico do robô para estimativa mais precisa da velocidade resultante do mesmo.
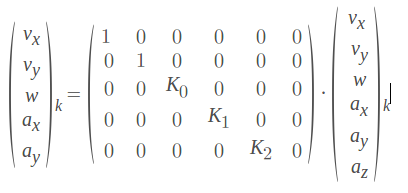
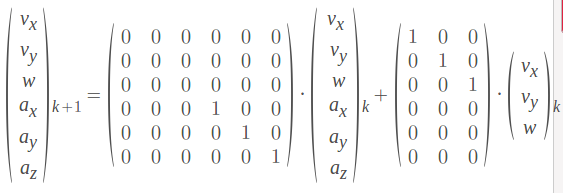
Dado o sistema x_{k+1} = A*x_{k} + B*u_{k} e z_{k} = C*x_{k}, definir qual o conteúdo do vetor de estados x, valores medidos z e das matrizes A, B e C.
Deseja-se saber com maior precisão o vetor velocidade do robô como um todo. Simples combinação das 4 velocidades das rodas não é suficiente por conta dos deslizamentos que podem aparecer durante o movimento.
Arquivos
{kind=link}
{kind=link}
Ações