Atividade #1292
AbertaFluxograma de tomada de decisão
Adicionado por Ana Luiza Buse da Silva mais de 6 anos atrás. Atualizado quase 5 anos atrás.
Descrição
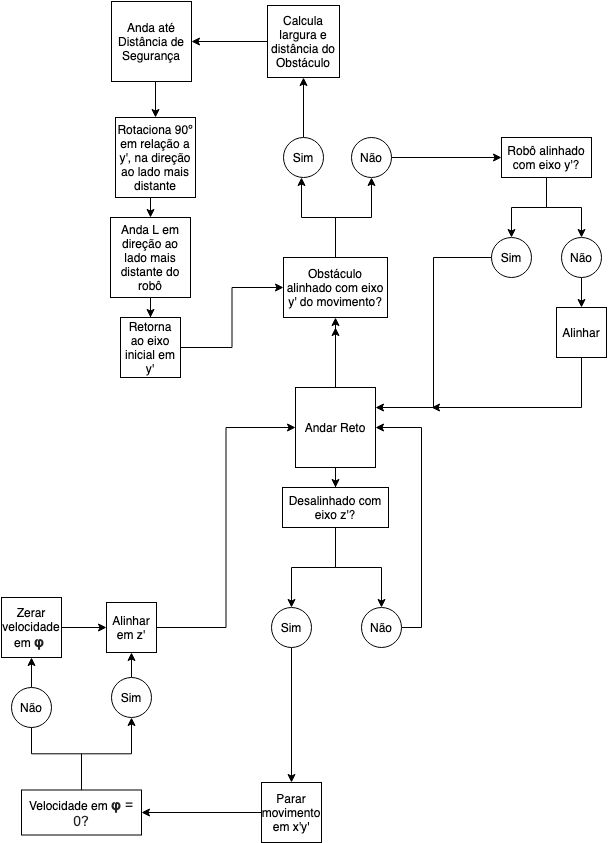
O primeiro passo é a construção de um fluxograma com a lógica a ser seguida pelo robô durante a tomada de decisão, levando em conta o uso de uma câmera para a visão, um sensor de distância TF Mini Lidar e uma MPU9250, conforme descrito na tarefa http://redmine.roboime.com.br/issues/1243 .
Arquivos
| eixosdereferência.drawio (1,17 KB) eixosdereferência.drawio | Eixos de referência na pista | Mateus Seppe, 25/03/2020 14:46 h | |
| Spherical-coordinates.png (17,6 KB) Spherical-coordinates.png | Exemplo do phi | Mateus Seppe, 25/03/2020 14:47 h | |
| fluxograma.drawio (3,17 KB) fluxograma.drawio | fluxograma | Mateus Seppe, 25/03/2020 14:48 h | |
| fluxogramainicial.jpg (43,8 KB) fluxogramainicial.jpg | Ana Luiza Buse da Silva, 25/03/2020 23:20 h | ||
| fluxograma27_03_20.drawio (2,33 KB) fluxograma27_03_20.drawio | Mateus Seppe, 27/03/2020 20:14 h | ||
| fluxograma27_03_20.jpg (35,5 KB) fluxograma27_03_20.jpg | Ana Luiza Buse da Silva, 28/03/2020 16:26 h |
{kind=link}
{kind=link}
{kind=link}
Atualizado por Ana Luiza Buse da Silva há mais de 6 anos
- Descrição atualizado(a) (diff)
Atualizado por Mateus Seppe há mais de 6 anos
- Arquivo eixosdereferência.drawio eixosdereferência.drawio adicionado
- Arquivo Spherical-coordinates.png Spherical-coordinates.png adicionado
- Arquivo fluxograma.drawio fluxograma.drawio adicionado
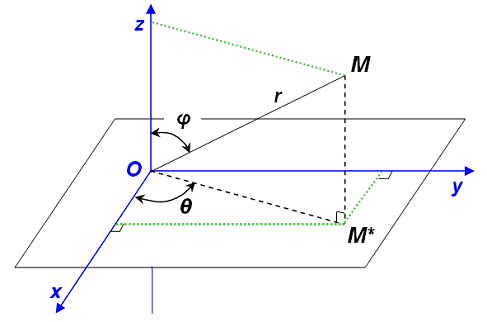
A ideia aplicada em relação aos eixos foi a seguinte: determinou-se um eixo xyz, que pode estar localizado em qualquer local conveniente, de tal modo que o eixo y seja paralelo às linhas de borda da pista de obstáculos, o eixo x sendo perpendicular às mesmas e o eixo z com orientação "para cima". Além disso, foi utilizado como principal referência um eixo x'y'z', este um eixo móvel tal que acompanhe o movimento do robô.
Já a referência ao phi, foi utilizado o sistema convencional de coordenadas polares nos eixos cartesianos, onde phi é o ângulo entre z e o vetor posição ou o vetor posição e sua projeção em xy (são complementares). Assim, foi considerado que o robô estaria caindo se seu vetor posição estivesse se aproximando de uma projeção (e que esta exista) em x'y', pois desta maneira teria uma componente v_phi com valor significativo.
Atualizado por Ana Luiza Buse da Silva há mais de 6 anos
- Arquivo fluxogramainicial.jpg fluxogramainicial.jpg adicionado
Vocês devem se atentar que o movimento não pode ser parado ou mudado durante o passo: o robô deve dar um passo, e ai ele pede o retornos dos sensores. O passo fica armazenado em um arquivo csv na memoria do robô, ele não é calculado durante o movimento, e sim previamente calculado no simulador e colocado nesse arquivo csv. Assim, quando ele percebe que está desalinhado em z', ele já esta parado no plano xy, porque esse feedback dos motores é pedido entre um passo e outro.
Outra coisa para vocês pesquisarem é se a visão consegue ou não calcular a largura do obstaculo. Se não, deve ser pensada uma forma de contornar o obstaculo. Já sobre isso, penso que talvez seja melhor colocar um bloco escrito "contornar obstaculo",sem determinar o modo, pois existem varias formas dele contornar, isso inclusive provavelmente será uma próxima tarefa.
Por fim, na parte de alinhamento com o eixo y, acho que deve ser dado mais destaque de que ele não deve apenas se alinhar, mas sempre procurar estar no meio do campo.
Atualizado por Luis David Peregrino de Farias há mais de 6 anos
Qualquer duvida sobre como funciona o movimento pode me contactar
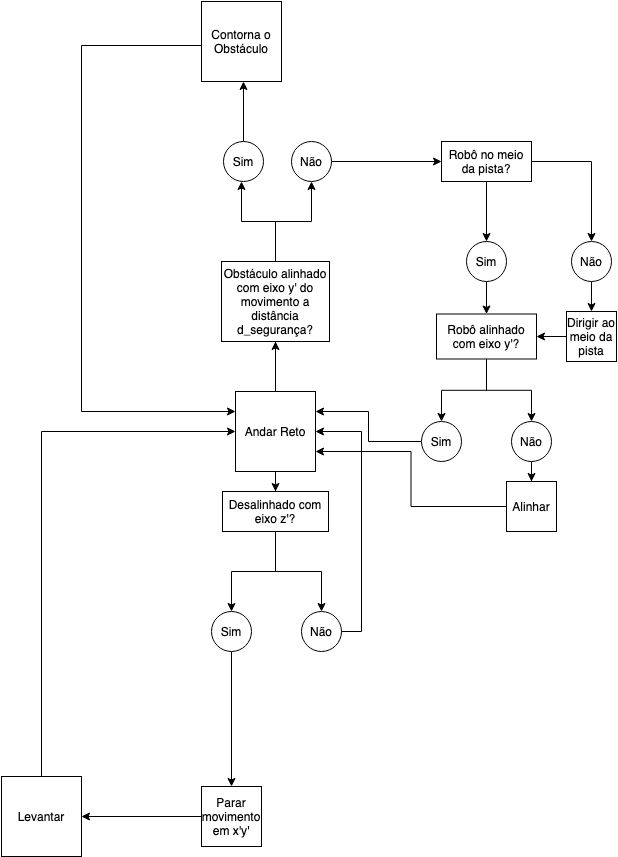
Atualizado por Mateus Seppe há mais de 6 anos
- Arquivo fluxograma27_03_20.drawio fluxograma27_03_20.drawio adicionado
Fizemos essas alterações para deixá-lo mais genérico como pedido, entendemos então que não haveria necessidade de realizar a análise prévia de v_phi visto que o sensor só nos avisaria se o robô estivesse "normal" ou no chão. Sendo assim, somente colocamos somente levantar.
Atualizado por Nicolas Oliveira há mais de 6 anos
Adicione as fotos sempre ao corpo do texto pra facilitar a leitura.
Atualizado por Ana Luiza Buse da Silva há mais de 6 anos
- Arquivo fluxograma27_03_20.jpg fluxograma27_03_20.jpg adicionado
Atualizado por André Vidal há quase 5 anos
- Situação alterado de Em andamento para Resolvida