Atividade #1243
FechadaEscolha dos sensores que serão implementados 2020
Descrição
O objetivo desta tarefa é decidir quais sensores serão implementados no projeto Humanoide no ano de 2020. No ano de 2019 o robô não utilizou sensores durante a competição, o que impossibilitou de participar de qualquer categoria que envolvesse obstáculos. Dessa forma, a implementação de sensores torna-se necessária para que o robô tenha melhor desempenho durante a próxima competição.
Sendo o objetivo principal o melhor desempenho na próxima competição e a possibilidade de ir para categorias com obstáculos, os sensores mais indicados são sensor de distância, acelerômetro e giroscópio.
Como a equipe já possui um sensor TF Mini LIDAR (sensor de distância) e uma placa MPU9250 (acelerômetro e giroscópio), esses são os sensores mais indicados para serem implementados.
")
MPU9250
")
TF Mini LIDAR
Arquivos
Atualizado por Mateus Souza Carvalho há mais de 6 anos
- Descrição atualizado(a) (diff)
Atualizado por Ana Luiza Buse da Silva há mais de 6 anos
- Projeto alterado de Humanoide (HRR) para Eletrônica
Atualizado por Luis David Peregrino de Farias há mais de 6 anos
Mateus, lembro de termos trabalhado nesses dois sensores já. Tenta resgatar o que foi feito até agora, acredito que o de distância o Fábio que trabalhou, já a MPU foi a Ana e o Fábio. A ideia é fazer um programa na rasp que retorne a distância pro lidar e a orientação do giroscópio e magnetômetro da MPU. Se possível ja tenta programar na rasp via SSH e em C++(conforme foi discutido em reunião), se junta com o Gabriel Lima pra isso, mas caso precise ser em python sem problema por enquanto.
Atualizado por Ana Luiza Buse da Silva há aproximadamente 6 anos
- Arquivo SEN0259-Uart.jpg SEN0259-Uart.jpg adicionado
- Arquivo SEN0259-MeasurementRange.jpg SEN0259-MeasurementRange.jpg adicionado
O TF Mini LiDAR é um telêmetro a laser unidirecional.Possui alto desempenho na medição de distâncias para detectar a distância a partir dos obstáculos.A distância máxima de detecção do TF Mini é de 12 metros. Dentro de 6 metros, sua precisão está dentro de 4cm, 6 ~ 12 metros, precisão dentro de 6 cm.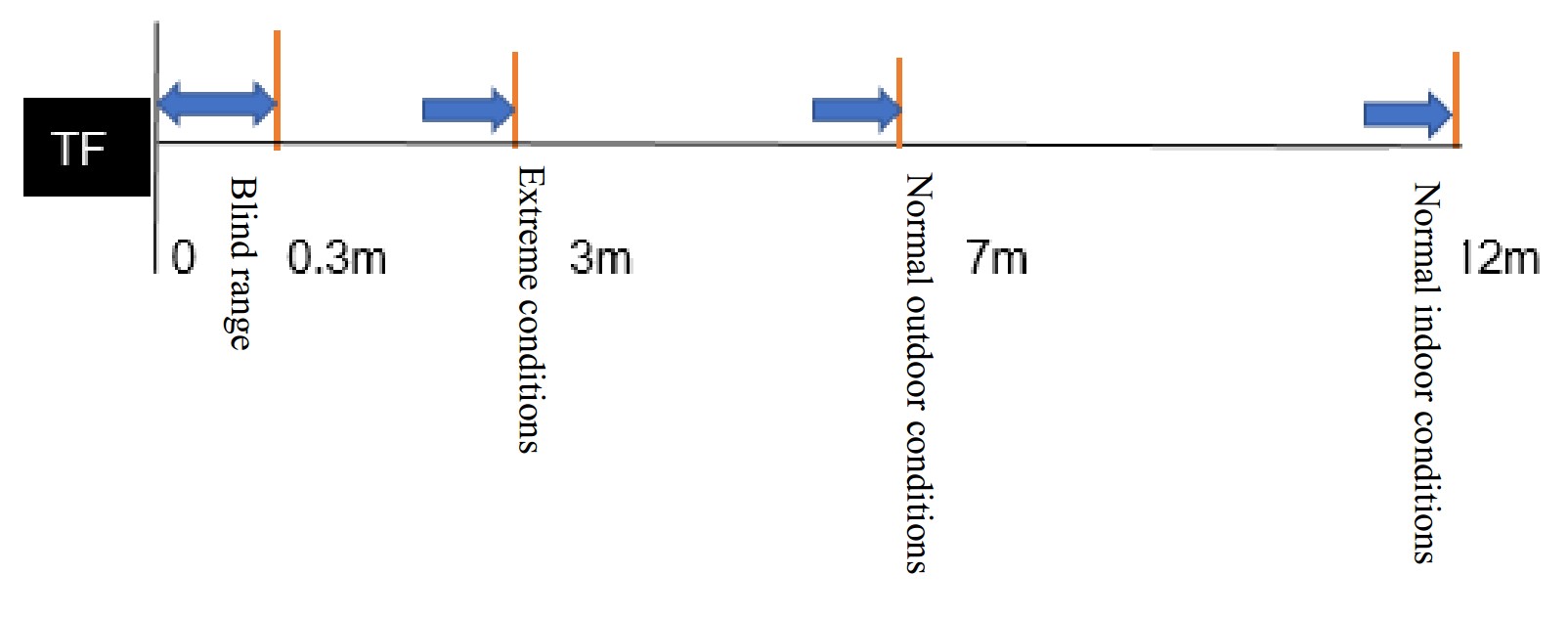
O TF Mini LiDAR adota a interface de comunicação UART (TTL), pode ser fornecida por 5V padrão.
Atualizado por Nicolas Oliveira há aproximadamente 6 anos
Quais são os sensores atuais?
Atualizado por Mateus Souza Carvalho há aproximadamente 6 anos
Nicolas Oliveira escreveu:
Quais são os sensores atuais?
Nenhum sensor foi utilizado na última competição.
Atualizado por Gabriel Lima há aproximadamente 5 anos
- Situação alterado de Em andamento para Fechada