Ações
Personalidades » Histórico » Revisão 8
« Anterior |
Revisão 8/48
(diff)
| Próximo »
Luciano Barreira, 04/05/2017 19:32 h
Personalidades¶
Segue descrição genérica do comportamento de cada personalidade.
- Defesa
A estratégia da defesa é criar uma parede de robôs. Para fazer isso, o primeiro robô designado a defesa irá ocupar a intersecção da linha, que conecta o centro do gol com a bola, com a circunferência com centro no meio do gol e raio der + l + d, onderé o raio do robô,l, a distância do gol ao começo da semicircunferência do gol, ed, o raio dessa semicircunferência. Os outros robôs designados a defesa irão, alternadamente, cada lado da barragem, ao longo da circunferência previamente citada, com uma distância de2rdo robô mais próximo. Isso irá evitar que a bola chegue no gol já que a parede de robôs sempre estará em sincronia com a bola.
- Atacante
O atacante é baseado em uma máquina de estado com as seguintes características:
Estados:
Goto and kick: Ir em direção a bola e realizar um chute a gol, quando em posição adequada para tal, ou seja atrás da bola e minimamente alinhados bola, target e robô;
Goto tangent: Ir para a tangente a uma circuferencia criada ao redor da bola, quando o robo se encontra entre a bola e o gol;
Rotate around the ball: Realizar uma rotação ao redor dessa circunferencia a fim de realizar o alinhamento entre target, bola e robô;
FSM detalhada:
Representação simplificada: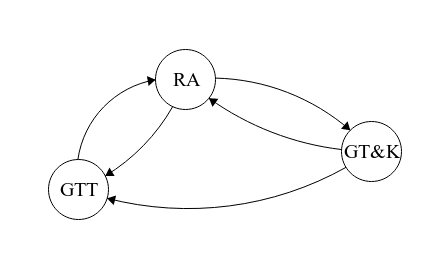
- Striker
O papel do striker consiste em se posicionar em posições favoráveis em campo para receber rebotes ou substituir o atacante quando este está impedido de chutar.
A decisão de se criar esta personalidade foi realizada como proposta da solução de dois problemas, uma vez que:
- Um robô não pode realizar duplo toque após comandado um Force Start pelo Juiz e
- Um atacante monolítico, ou seja, uma única entidade responsável por conquistar a posse de bola é ineficaz.
- Goalie
O papel principal do Goalie é interceptar a bola sem que esta atinga o gol. Para isso, é necessário que o goleiro, de forma ágil,
se posicione em uma região do gol em que a probabilidade de que a bola entre no gol seja mínima. Como uma solução intuitiva para
o problema, o Goalie se posiciona na região do gol mais próxima da linha de campo para qual o robô inimigo que tem posse de bola
está orientado. Caso não haja posse de bola inimiga e a bola está se movimentando em direção ao gol, o Goalie se posiciona onde é
provável que a bola atinja, com base em estimativas da velocidade de bola.
Atualizado por Luciano Barreira há aproximadamente 9 anos · 8 revisões