Atividade #992
FechadaModelagem de acelerômetro em Matlab
Arquivos
{kind=link}
Atualizado por Onias Castelo Branco há mais de 7 anos
- Atribuído para ajustado para Guilherme Gonçalves
Atualizado por Guilherme Gonçalves há mais de 7 anos
- Arquivo 287-1524-2-PB.pdf 287-1524-2-PB.pdf adicionado
- Atribuído para excluído (
Guilherme Gonçalves)
Encontrei um artigo, uma tese de mestrado e um TCC quem contém muitos dos tópicos que o Onias falou que seriam importantes como erro por ruído gaussiano branco, deslocamento de centro de massa, filtragem e modelagem com Simulink. Seguem os links:
1. Artigo: em anexo (287-1524-2-PB.pdf).
3. TCC: http://monografias.poli.ufrj.br/monografias/monopoli10010609.pdf
Olharei mais a fundo cada um deles e começarei em seguida fazer a simulação no Matlab.
Atualizado por Onias Castelo Branco há mais de 7 anos
- Atribuído para ajustado para Guilherme Gonçalves
Achei aqui que o matlab tem um trial de simulador de IMU. Pode ser util pra gente.
https://www.mathworks.com/help/fusion/examples/introduction-to-simulating-imu-measurements.html
nesse exemplo fala dos erros principais e pouparia o tempo de implementação (tem que ver quanto tempo é o trial)
Essa Tese ai que tu falou parece muito boa pra representar o modelo. Tem as fórmulas lá e provavelmente deve falar da ordem de grandeza dos erros. (Quando chegar nesta etapa, olhar datasheet do MPU-9250 e ver se eles tem esses números lá).
Não achei a parte do deslocamento do centro de massa, ta em qual dos 3?
Atualizado por Guilherme Gonçalves há mais de 7 anos
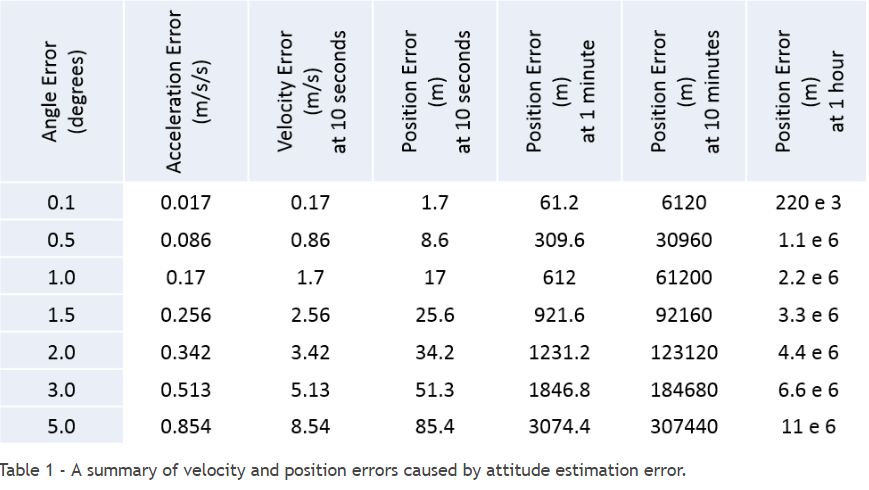
- Arquivo taberrovel.png taberrovel.png adicionado
Tou fazendo o tutorial do Simulink pelo seguinte link: https://www.mathworks.com/products/simulink/getting-started.html?s_eid=PSM_15028. A página, que falei pro Onias, que tinha informações úteis sobre a aquisição da velocidade a partir do vetor de aceleração da IMU é a seguinte: http://www.chrobotics.com/library/accel-position-velocity . Algo interessante dessa página é a seguinte tabela que mostra o erro na velocidade e na posição com o passar do tempo.

Atualizado por Guilherme Gonçalves há aproximadamente 6 anos
- Situação alterado de Em andamento para Fechada