Atividade #706
FechadaImplementar segunda suavização de trajetória.
Descrição
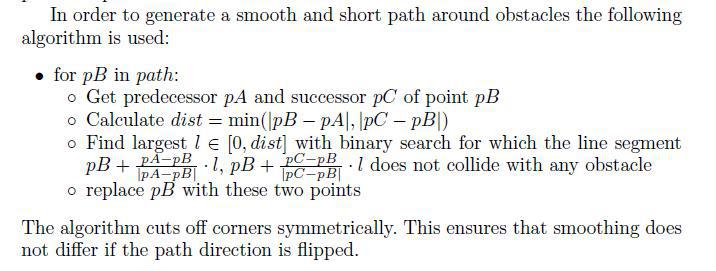
A ER-force usa um segundo algoritmo de suavização que pode ser encontrado em seu tdp anexo e obedece o algoritmo abaixo.

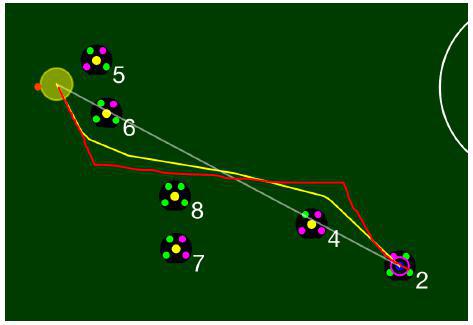
Esse algoritmo visa retirar as quinas da trajetória suavizada pelo nosso algoritmo atual, seria uma segunda suavização. Nessa imagem abaixo a trajetória em vermelho seria a gerada pelo algoritmo atual e a em amarelo a com a segunda suavização.

Do ponto de vista do controle, retirar essas quinas é bom, mesmo sendo adicionados alguns poucos pontos na trajetória, porque assim as curvas são "divididas" e o robô não precisa reduzir tanto nas curvas fechadas.
Não sei se a implementação é simples e se o resultado vale a pena. Um estudo melhor deve ser feito.
Arquivos
{kind=link}
{kind=link}
Atualizado por Carla Cosenza há aproximadamente 8 anos
A vi SmootherPath foi desenvolvida, porém ainda há muitos bugs nela.
Atualizado por Carla Cosenza há aproximadamente 8 anos
- Situação alterado de Não Iniciada para Em andamento
A vi com buscar binária foi desenvolvida, mas o path não está correto. Analisando o código, acho que o problem está no DetectCollision, que foi reaproveitado do SmoothPath. Algumas simplificações foram feitas no DetectCollision pela condição do path gerado pelo RRT, mas essas simplificações não valem no SmootherPath. Logo vou fazer uma nova vi para detectar colisões e testar.
Atualizado por Gabriel Borges da Conceição há quase 8 anos
- Situação alterado de Em andamento para Resolvida
Atualizado por Gabriel Borges da Conceição há quase 8 anos
- Situação alterado de Resolvida para Fechada