Ações
Atividade #503
FechadaImplementar BallReplacement e Robot Replacement no grSim
Situação:
Fechada
Prioridade:
Normal
Atribuído para:
-
Descrição
Implementar reposicionamento da bola e dos robôs no grSim, consoante as descrições dos pacotes protobuf:
https://github.com/RoboCup-SSL/grSim/blob/master/src/proto/grSim_Replacement.proto
Arquivos
{kind=link}
Atualizado por Luciano Barreira há mais de 8 anos
- Arquivo replace.PNG replace.PNG adicionado
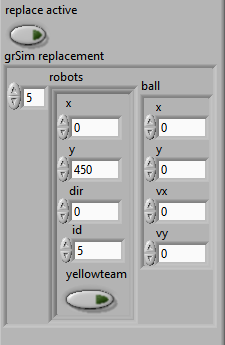
Implementado e adicionado à aba TX info do canto inferior direito do SSL Vision Log Player, consoante imagem:

Ativado quando booleano 'replace active' em True. Parâmetros inseridos em milímetros
Obs.: Dessa forma não é possível imprimir velocidade nos robôs, apenas na bola. Para tanto teríamos que alterar o grSim e recompilá-lo, o que desprenderia um esforço muito grande, desproporcional à recompensa.
Atualizado por Luciano Barreira há mais de 8 anos
- Situação alterado de Em andamento para Fechada
Ações