Atividade #424
FechadaMelhorar ultrapassagem da bola
Descrição
Atualmente somamos na velocidade do robô a velocidade da bola para q ele seja capaz de ultrapassa-la. Porém atualmente isso n tem sido suficiente para pegarmos a bola em movimento.
A sugestão do capitão era acelerarmos com velocidade máxima até ultrapassarmos a bola sempre.
Outra ideia era utilizarmos uma velocidade a mais de K vezes a da bola, sendo K suficiente para ultrapassarmos ela.
Arquivos
{kind=link}
{kind=link}
{kind=link}
Atualizado por Luiz Renault Leite Rodrigues há mais de 8 anos
Na verdade, a sugestão era predizer a trajetória da bola e, baseado nas limitações do robô, planejar o ponto de interceptação. Isso por si só já permitiria a aproximação em velocidade máxima e o contato com a bola no menor tempo possível.
Atualizado por Nicolas Oliveira há mais de 8 anos
- Arquivo UltrapassagemBola.mp4 UltrapassagemBola.mp4 adicionado
- Data prevista ajustado para 28/10/2017
- Situação alterado de Não Iniciada para Em andamento
Atualizado por Nicolas Oliveira há mais de 8 anos
- Arquivo ultrapassagem.png ultrapassagem.png adicionado
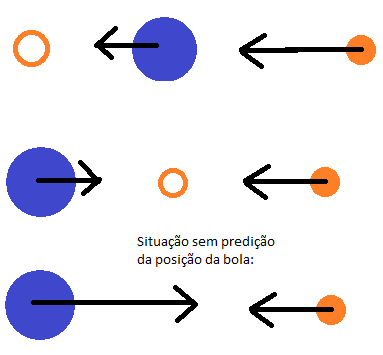
uma situação problemática nessa abordagem é quando a bola vem na direção do robô. Como ele está tentando ir aonde a bola vai estar daqui a, por exemplo 0,5s, o robo acaba dando "ré" ao invés de ir na direção da bola, ou indo mais devagar em direção a ela pois se considera mais próximo do ponto aonde deveria estar. Nesses casos deveríamos "ignorar" a predição da posição dá bola para ter uma melhor interceptação da bola.

Porém n sei qual critério utilizar para me considerar nessas situações, pq caso a bola n venha exatamente na direção do robo queremos q ele a intercepte sendo interessante a previsão da posição, nem como "ignorar" isso. Alguma ideia?
Atualizado por Luiz Renault Leite Rodrigues há mais de 8 anos
Na verdade, tem que ser planejado o ponto de interceptação da bola.
Neste planejamento que deverão ser considerados os diferentes cenários. E sempre o robô precisa ir na maior velocidade para o ponto de interceptação.
Atualizado por Nicolas Oliveira há mais de 8 anos
- Arquivo ultrapassagem.png ultrapassagem.png adicionado
- Arquivo Video_1508942762.mp4 Video_1508942762.mp4 adicionado
- Arquivo ultrapassagem2.png ultrapassagem2.png adicionado
- Situação alterado de Em andamento para Feedback
- Versão ajustado para LARC 2017
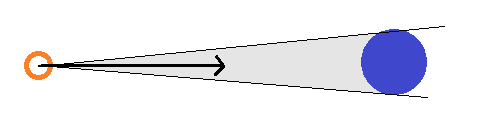
Quando a velocidade da bola se encontra dentro da região cinza o robo n vai em direção a posição futura e sim em direção a bola se antecipando.

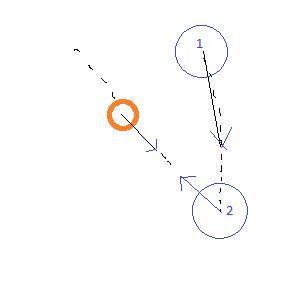
Realizando um movimento como o ilustrado na figura abaixo. Onde ele tenta se alinhar com a bola indo para o ponto futuro e a partir do alinhamento avança pra bola interceptando ela.

Atualizado por Leonardo Gomes Goncalves há mais de 8 anos
- Situação alterado de Feedback para Fechada
Fechamento de todas atividades passadas visando renovação para 2018 do redmine da inteligência.