Atividade #1319
AbertaMeta #1296: Implementação dos sensores
Gerar um código para pegar feedback do sensor MPU9250 (IMU)
Descrição
As IMU geralmente tem o objetivo de pegar os seguintes ângulos: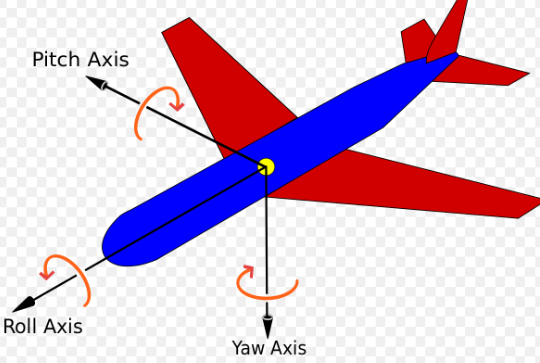
Mas para o nosso projeto, a princípio só precisamos do ângulo yaw, pois o sensor será usado para a competição de desvio de obstáculo e para corrigir a direção da caminhada durante a corrida, caso seja necessário.
O código deve ser capaz de obter esse ângulo, tendo como referência a direção paralela à pista, marcada de preto na imagem:
Arquivos
Atualizado por Mateus Souza Carvalho há aproximadamente 6 anos
- Arquivo MPU9250.py MPU9250.py adicionado
- Arquivo imu_versao1.PNG imu_versao1.PNG adicionado
A primeira versão do código já foi feita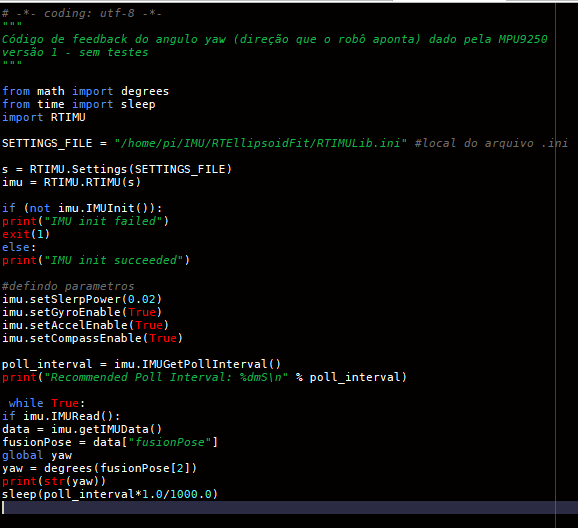
Será iniciada (23/05/2020) a fase de testes do código e tentativas de calibração. Caso necessário, serão anexadas novas versões.
Atualizado por Luis David Peregrino de Farias há aproximadamente 6 anos
Ótimo, já foram feitos alguns testes de bancada? Sugiro comparar com o giroscópio/bussola do celular e com um transferidor. Por ultimo lembro que o pitch também pode ser usado futuramente para detecção de quedas e altura de objetos, já o roll pode ser utilizado para fazer algumas correções no algorítimo de visão, então é interessante que já se consiga fazer a leitura de todos os valores para se ter como base no futuro.
Atualizado por Gabriel Lima há quase 6 anos
- Arquivo Raspberry_Pi_GPIO.png Raspberry_Pi_GPIO.png adicionado
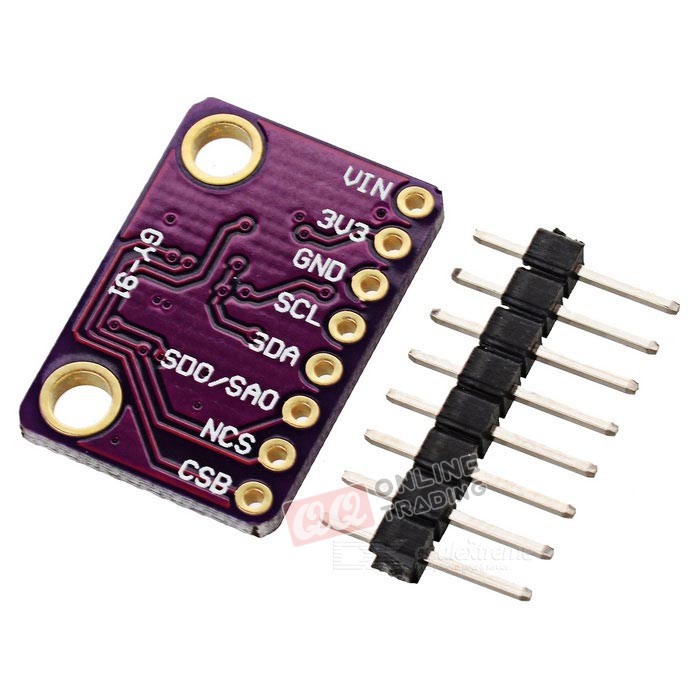
- Arquivo GY-91.jpg GY-91.jpg adicionado
Pinagem do Raspberry Pi e do sensor: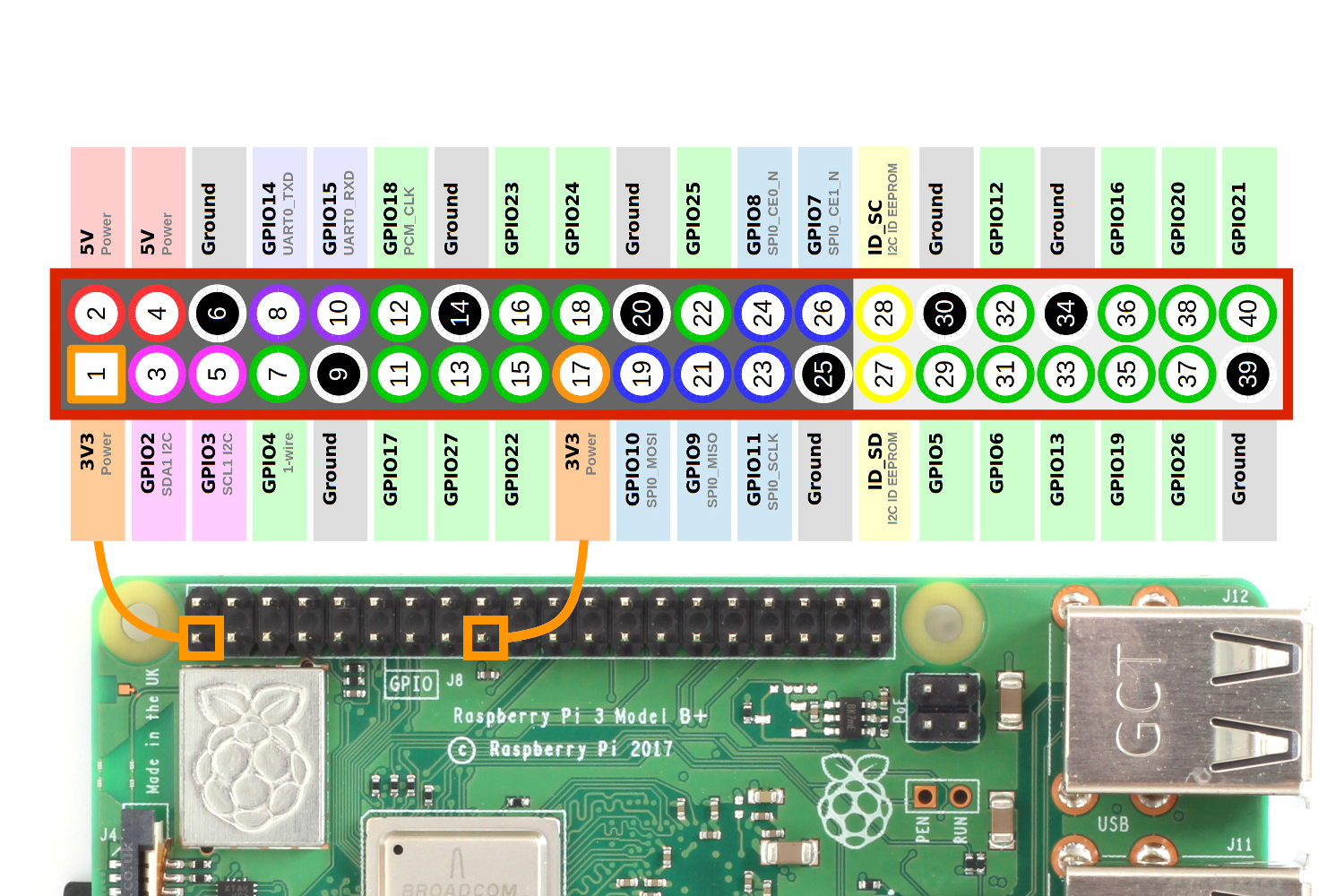
Atualizado por Gabriel Lima há quase 6 anos
o VIN do sensor vai na porta 5v, GND no GND, SCL no SCL1, SDA no SDA1