Atividade #785
FechadaChecklist RoboCup
Descrição
Vamos documentar aqui nesta tarefa todo o TODO da robocup.
Arquivos
{kind=link}
Atualizado por Lucas Germano há aproximadamente 7 anos
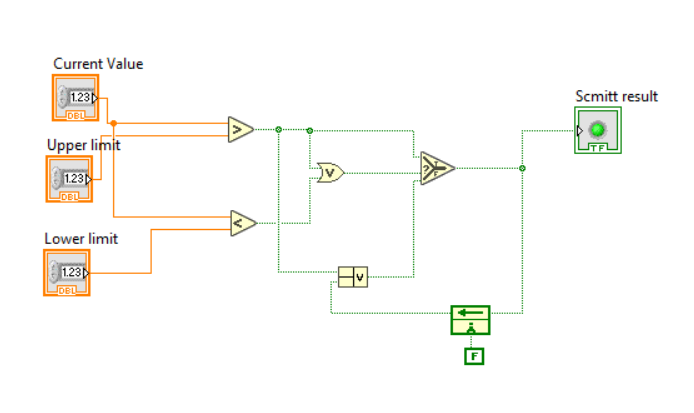
- Arquivo picture396-1.png picture396-1.png adicionado
Foi resolvido: "No começo do jogo, o striker não sabe para qual ponto vai, pois o attacker está exatemente em y = 0, daí ele fica oscilando entre y positivo e negativo" usando schmitt trigger, com upper limit = 300mm, lower limit = -300mmm e desired value = 0mm.

Atualizado por Lucas Germano há aproximadamente 7 anos
"Consertar o timer do pass state que está sendo executado fora do estado de passe" foi consertado adicionando um OR com a negação do Pass State na hora de mandar o atacker ficar parado esperando pelo striker. Esse erro fazia com que no começo do jogo o atacker esperasse o striker se movimentar para o passe, sendo que não há passe.
Atualizado por Lucas Germano há aproximadamente 7 anos
Caso o passe fique bom, iremos usar ele no Prepare kickoff ally.
Atualizado por Nicolas Oliveira há aproximadamente 7 anos
O erro: "Ajeitar o smooth para quando o obstáculo está no ponto (0,0) e o robô está se movimentando sobre y = 0, variando sua posição em x"
foi consertado: duas VI's diferentes mandavam um cluster de tamanho diferente, fazendo com que a posição do robô fosse certa e m um cluster, mas errada no outro. Este caso facilitou nossa visualização do erro, mas pensamos que o RRT deve ter melhorado de uma forma geral.
Atualizado por Lucas Germano há aproximadamente 7 anos
"Ao desligar um robô, o goleiro fica maluco"
A VI Select Ball By Confidence eliminava mais de um robô do vetor quando a gente desligava um deles. Passamos muito tempo para encontrar o erro, é fundamental que revisemos o funcionamento a cada modificação.
Carla revisar o código, por favor.
Atualizado por Nicolas Oliveira há aproximadamente 7 anos
Minha primeira implementação de tratamento de perfil de velocidade inválido n funciona bem. Vou trabalhar em uma nova, pq o robô gera overshoot ou fica extremamente lendo quando recebe um perfil inválido.
Atualizado por Carla Cosenza há aproximadamente 7 anos
Foi arrumado a tag "O striker está invadindo a área inimiga quando vai receber o passe." O best-y inverso faz uma varredura de ângulos, e para prevenir isso, limitamos os ângulos de começo de e fim de varredura. No campo anterior, o problema para determinar o primeiro ângulo era o fato que a área tinha partes circulares, e consequentemente o melhor ponto não era igual para todas as posições do striker. Mas agora que a área é retangular, o ponto é a quina mais longe do robô em termos do eixo y e mais perto do centro do campo em relação ao eixo x. O único problema é quando o robô passa a área, pois então o calculo pode encontrar posições dentro da área.
Atualizado por Carla Cosenza há aproximadamente 7 anos
Foi resolvido o flag de: "ao desligar um robô, o goleiro fica maluco." O problema estava na filtragem da camera, pois quando o robo sumia, ele ficava com todos seus valores iguais a 0.
Atualizado por Carla Cosenza há aproximadamente 7 anos
Foi implementando um modo de escolher quais câmeras é para ignorar. Tem que testar no campo pois no grSim não funciona essa VI.
Atualizado por Lucas Germano há aproximadamente 7 anos
"Testar o comportamento default do striker":
Striker foi setado para manmark em Direct Free Enemy e Indirect Free Enemy
Atualizado por Carla Cosenza há aproximadamente 7 anos
Para resolver o problema das pessoas entrarem no campo e virarem bola, o calculo da bola por confiança ponderada foi alterada para que somente as bolas perto da bola de maior confiança fossem consideradas no cálculo.
Atualizado por Carla Cosenza há aproximadamente 7 anos
- Situação alterado de Em andamento para Resolvida
Todas as tags ainda não resolvidas foram passadas para a 2ª lista, para melhor organização.
Atualizado por Gabriel Borges da Conceição há quase 7 anos
- Situação alterado de Resolvida para Fechada