Meta #628
AbertaEstudo da utilização de três rodas omnidirecionais no projeto
Descrição
Estudo da viabilidade da utilização dessa geometria e levantamento de dados cinemáticos.
Arquivos
{kind=link}
{kind=link}
Atualizado por Anônimo há mais de 8 anos
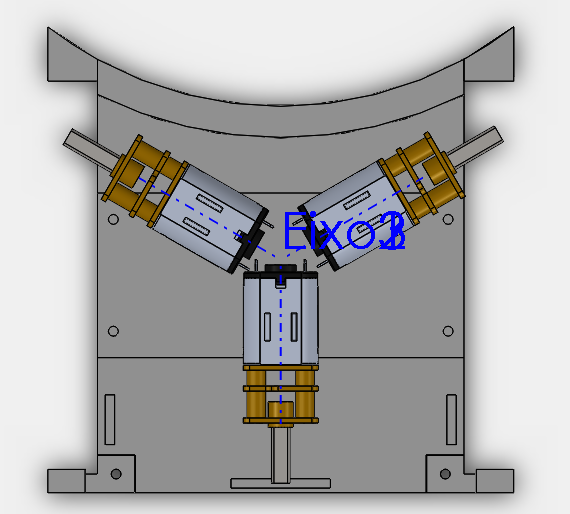
- Arquivo Teste omni.PNG Teste omni.PNG adicionado
Como segue em anexo, foi feito um modelo em SW para a verificação da viabilidade da implementação de três rodas omnidirecionais.
Porém, ao dispor os modelos dos motores (ainda sem encoder) em uma distribuição simétrica, verificou-se que o espaço para as rodas fica muito reduzido para as dimensões máximas impostas pela competição.
Outro ponto negativo dessa distribuição seria uma velocidade máxima reduzida em um fator de [(3)^(1/2)]/2 em relação à distribuição com apenas duas rodas. Além disso, deve ser analisado que essa modificação leva ao aumento da mobilidade do robô, porém a adaptação da geometria da carcaça para "duas frentes" também traria aumento de mobilidade com o adicional de demandar menos da equipe de inteligência, de recursos financeiros e da fabricação de rodas omnidirecionais com dimensões reduzidas.
Atualizado por Luiz Renault Leite Rodrigues há mais de 8 anos
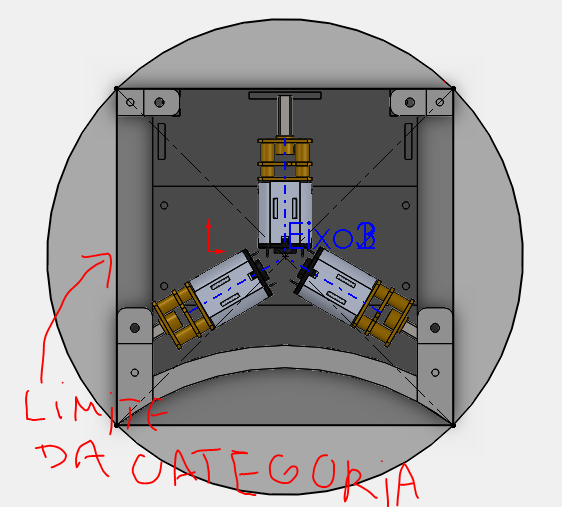
Por favor faça um esboço com o raio máximo do robô a partir do centro dos motores.
Atualizado por Anônimo há mais de 8 anos
- Arquivo Teste omni2.PNG Teste omni2.PNG adicionado
O desenho contém um raio tangente ao vértices do robô, porém a normada categoria prevê uma geometria cúbica de, no máximo, 75X75X75mm, que está representada pelo quadrado indicado no esboço.