Defeito #210
Fechada
Comunicação com dois robôs ou mais
Adicionado por Onias Castelo Branco aproximadamente 9 anos atrás.
Atualizado mais de 7 anos atrás.
Descrição
- O firmware, na recepção, ignora pacotes de outro id?
- Os dois robôs estão programados com o mesmo firmware?
- Os dois têm dipsw?
- Os dipsw estão em posições diferentes?
- Procurar erro no labview
- Como é determinado o id para transmissão?
- Esse id é adicionado ao pacote que vai para a serial?
- a serial do transmissor está configurada para retransmitir o pacote independentemente de qual o id?
Arquivos
Fizemos os testes usando a VI joystick_controlling_2_robots.vi (SSLVIEW, branch joystick-feature), corrigimos um detalhe no firmware(configurar o endereço da pipe0 do NRF24 para ACK) e colocamos um delay de 5ms entre as transmissões para cada robô na vi citada.
Foi possível controlar 2 robôs ao mesmo tempo, desde que cada um tivesse um id distinto.
(Entretanto, se tivessem o mesmo id, um robô específico parava de receber)
- Situação alterado de Em andamento para Feedback
Mas o problema foi então corrigido?
Luiz Renault Leite Rodrigues escreveu:este
Mas o problema foi então corrigido?
Não chegamos a testar com o SSL_Vision_Log_Player. O que concluímos é que o firmware está OK. Sugiro que a inteligência teste também, se houver um erro, eles já começam a trabalhar para corrigir.
Seria necessário adicionarmos um delay antes e outro depois da escrita da serial?
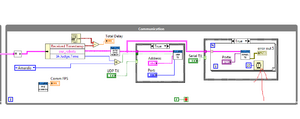
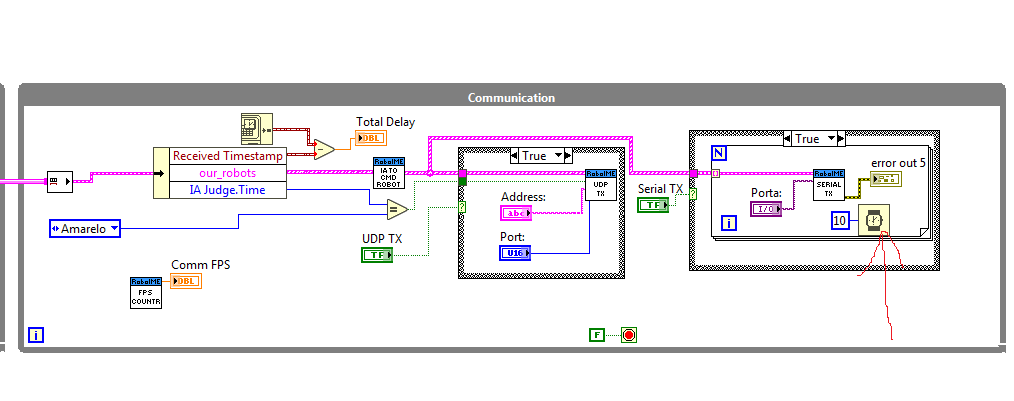
Como é feito o loop de comunicação:
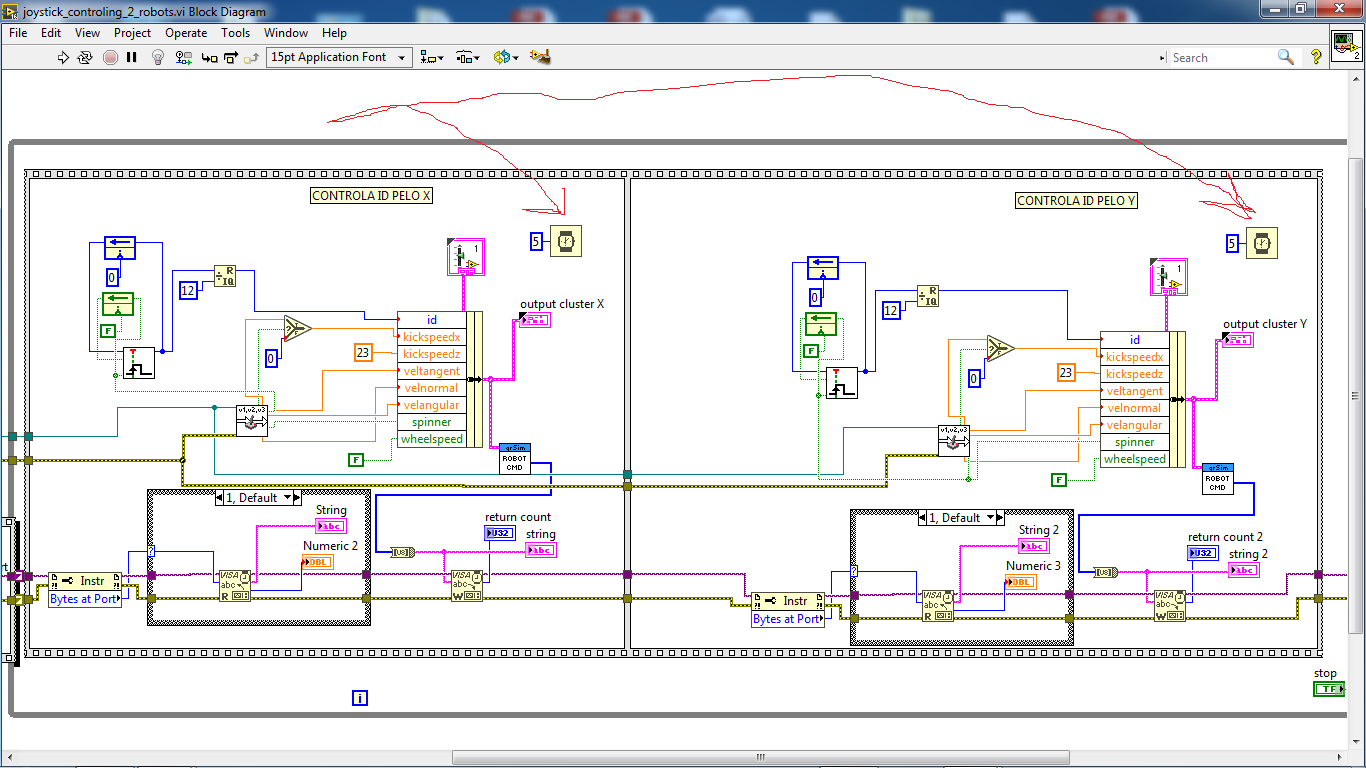
Como foi feita a vi que controla dois robôs no mesmo joystick:
- Situação alterado de Feedback para Fechada
Exportar para Atom
PDF
{kind=link}
{kind=link}