Ações
Atividade #1151
FechadaImplementar nova escolha de câmeras
Início:
19/08/2019
Data prevista:
30/08/2019
Descrição
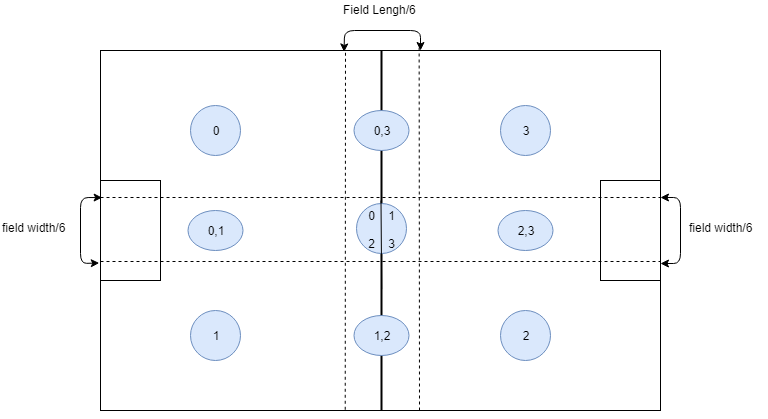
Em testes no pirf, percebemos que em diversas situações seria melhor pegar as informações de determinado robô ou bola apenas de uma câmeras ou talvez duas. Isto se deve pelo fato de que a câmera mais próxima do objeto exibe uma posição mais fiel.
O objetivo desta tarefa é primeiro definir as regiões do campo em que utilizaremos cada câmera (baseado na posição relativa objeto-câmera), podendo usar apenas uma ou mesmo todas. Após essa definição inicial, a implementação de código será realizada na mesma estrutura e VIs já existentes, que fazem a média das câmeras.
Arquivos
{kind=link}
Ações