Atividade #1100
FechadaRefatoração da comunicação
Descrição
Time: Leonardo, Felipe e Carla
As tarefas desse time serão para colocar a comunicação na nova inteligência e fazer a transformação dos dados orientados a objeto para o formado antigo. De tal forma que possamos usar a comunicação antiga com um "proxy" entre a inteligência e a comunicação.
Arquivos
{kind=link}
{kind=link}
{kind=link}
Atualizado por Felipe Welington há aproximadamente 7 anos
- Arquivo imagem 1.png imagem 1.png adicionado
- Arquivo imagem 2.png imagem 2.png adicionado
Desenvolvimento
O nosso grupo se reuniu criando os metodos da comunicação:
1. communicateSerial : Transmite os comandos do robô para a placa de comunicação.
2. communicateSOS : Transmite o estado do game para o SOS
3. communicateUDP : Transmite os comandos do robô para o grSim
4. FPScounter: Oferece o Fps
5. communicate: Junta todos os métodos.
Metodologia
Buscando seguir a padronização do time da visão,criou-se 1 pasta para os methods e outra para alocar as Vi´s antigas.
Nesse processo, ao fazer os métodos utilizou-se Vi´s do código antigo,dessa maneira, era para ter sido vinculado tais como métodos,todavia ao tentar adiciona-las acontecia um erro que impossibilitava essa ação.Logo,criou-se tais metodos sem esse passo. O que pode ter originado, este erro ao ser clonada por outro pc:
Aparentemente, ao abrir o código antigo (SSL Vision Log Player) as Vi´s voltam ao normal.
Sugestões para melhoria do codigo
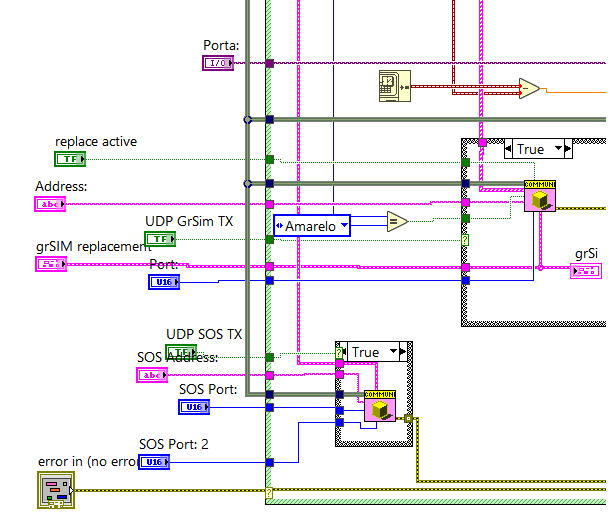
Na comunicação,há parametros demais conforme esta figura,percebe-se a poluição da imagem.
Nesse aspecto,sugeriu-se transformar alguns parametros únicos da comunicação em atributos,uma vez que estariam no comunication in.Cita-se , os parametros port visa, port UDP , port SOS.
Atualizado por Leonardo Gomes Goncalves há aproximadamente 7 anos
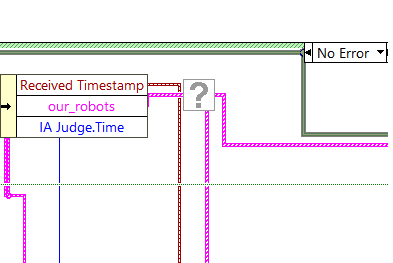
Criado mais um método getData, para passagem das informações de Game pra comunicação.
Os métodos agora são:
1. communicateSerial : Transmite os comandos do robô para a placa de comunicação.
2. communicateSOS : Transmite o estado do game para o SOS
3. communicateUDP : Transmite os comandos do robô para o grSim
4. FPScounter: Oferece o Fps
5. communicate: Junta todos os métodos.
6. getData: Passagem das informações de Game pra Com.
Falta apenas os testes
Atualizado por Gabriel Borges da Conceição há aproximadamente 7 anos
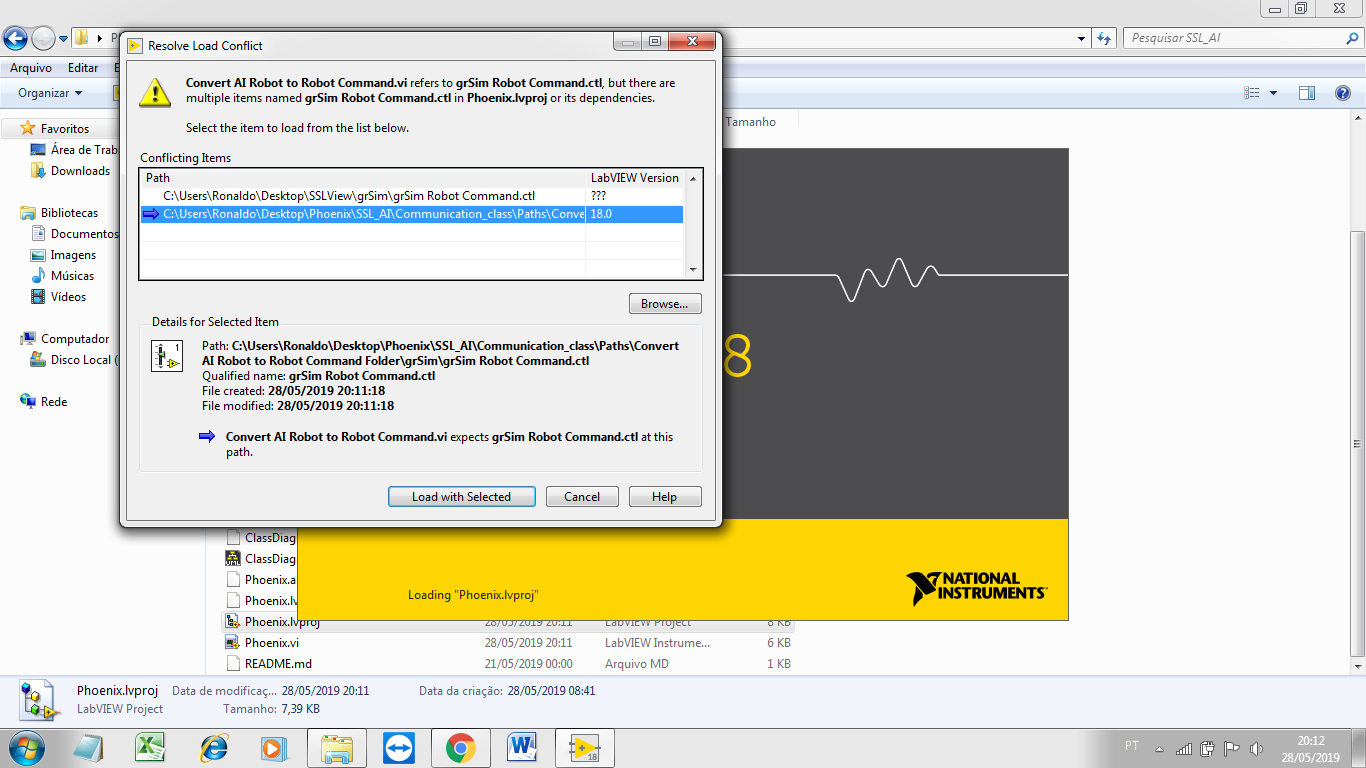
Está dando problemas de encontrar VI's quando abre o projeto:

Atualizado por Gabriel Borges da Conceição há aproximadamente 7 anos
Foi feito o merge das branches relativas à comunicação, visão e inteligência.
Todos os erros já foram consertados e o código dessa junção se encontra na branch mergeIntelVisionCom.
OBS: as branches dev, newVision e newCommunication permanecem intactas.
Peço que abram o código da branch mergeIntelVisionCom e confiram se está realmente tudo certo.
Atualizado por Leonardo Gomes Goncalves há aproximadamente 7 anos
Testada a Comunicação UDP com Grsim de 4 cameras;
Testada a Comunicação Serial com os Robôs no campo do pirf;
Criado novo método equivalente ao antigo EloMecTester.
Atualizado por Gabriel Borges da Conceição há quase 7 anos
- Situação alterado de Em andamento para Fechada
Tarefa encerrada.