Controle pid da roda » Histórico » Revisão 6
« Anterior |
Revisão 6/12
(diff)
| Próximo »
Gustavo Claudio Karl Couto, 30/04/2017 02:12 h
Controle pid da roda¶
Tutorial - criando um modelo: https://www.mathworks.com/help/simulink/gs/create-a-simple-model.html
Tutorial - modelando um motor: https://www.mathworks.com/videos/modeling-a-dc-motor-68852.html
Design pid: http://www.mathworks.com/help/control/pid-controller-design.html
frequência do contador do pwm (amostragem do pwm)= 20MHz
período da onda do pwm é 1/20kHz
pagina 152 e 640
pwm.cpp
TIM_TimeBaseStructure.TIM_Prescaler=(SystemCoreClock/20000000)-1;
TIM_TimeBaseStructure.TIM_Period=168000000/168000;/roboime-firmware/src/boot/system_stm32f4xx.c
System Clock source | PLL (HSE)
*---------------------------------------------------------------------------
* SYSCLK(Hz) | 168000000
*---------------------------------------------------------------------------
* HCLK(Hz) | 168000000
*---------------------------------------------------------------------------
* AHB Prescaler | 1
*---------------------------------------------------------------------------
* APB1 Prescaler | 4
*---------------------------------------------------------------------------
* APB2 Prescaler | 2 System Clock source | PLL (HSE)
*---------------------------------------------------------------------------
* SYSCLK(Hz) | 168000000
*---------------------------------------------------------------------------
* HCLK(Hz) | 168000000
*---------------------------------------------------------------------------
* AHB Prescaler | 1
*---------------------------------------------------------------------------
* APB1 Prescaler | 4
*---------------------------------------------------------------------------
* APB2 Prescaler | 2Interrupção do timer de controle do motor a 1k
/roboime-firmware/src/control/TimerTime.cpp
TIM_TimeBaseStructure.TIM_Prescaler=83;
TIM_TimeBaseStructure.TIM_Period=1000;resposta do motor de velocidade 2.5m/s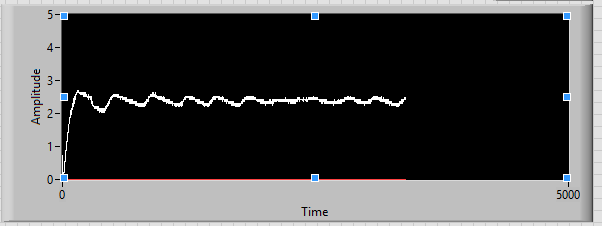
Atualizado por Gustavo Claudio Karl Couto há aproximadamente 9 anos · 6 revisões