Ações
Meta #1321
AbertaImplementação da visão computacional
Início:
23/05/2020
Data prevista:
Descrição
A visão computacional terá como objetivo principal detectar os obstáculos da pista, mas também pode servir para ajudar a manter o robô caminhando na direção paralela à pista.
A implementação tem duas etapas principais: gerar o código de um detector de obstáculos e treinar o detector com imagens (machine learning).
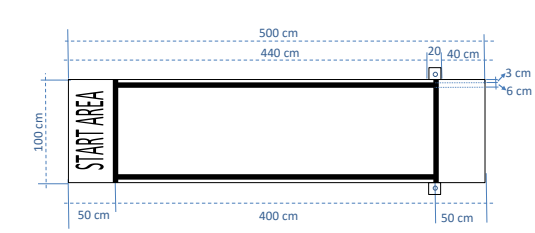
Os obstáculos e a pista seguem um padrão de cor e formato bem específicos, o que facilitará o treinamento do detector usando réplicas e simulando a competição em laboratório: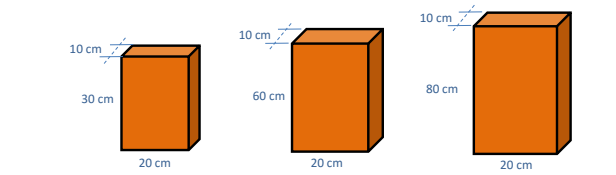
Arquivos
Nenhuma informação disponível
Ações