Obj Detector » Histórico » Revisão 5
« Anterior |
Revisão 5/7
(diff)
| Próximo »
André Vidal, 22/08/2021 20:07 h
Obj Detector¶
Essa função deve retornar o ponto médio da linha mais baixa do primeiro obstáculo detectado.
É partido do ponto de que a imagem enviada está invertida, então para uma visualização mais intuitiva, a imagem é rotacionada através dos passos seguintes:
São criadas variáveis para armazenar a altura e a largura através de um método dos objetos do tipo imagem. Com essas variáveis é criada uma tupla que guarda as coordenadas do centro. A rotação é feita com a função wapAffine e o objeto auxiliar M correspondente a uma matriz de rotação, que precisou da tupla que guardava o centro e as dimensões da imagem. A rotação feita é de 180º e a escala da imagem é mantida.
Após a rotação, são criados e usados dois vetores (lower e upper) para guardar os valores de uma máscara hls para deixar passar o laranja. Não testamos o filtro dessa função ainda com várias imagens, mas ele parece estar pegando um pouco mais do que o necessário, como alguns vermelhos escuros. Para criar a mascara primeiro é criada uma nova imagem com as cores no formato hls. Após isso, é criado o objeto orangemask com a função inRange.
Em seguida, é criada uma lista de retas com a função HoughLinesP. As retas na verdade são grupos de quatro numero na ordem x1,y1,x2,y2, em que (x1,y1) e (x2, y2) definem os dois pontos do segmento de reta.
Em seguida é feita uma varredura nas retas em busca da que conta com o maiores y1 ou y2, pois em teoria esta semirreta é a mais baixa visto que o eixo y é para baixo.
Acredito que aqui mereça ser feita a seguinte correção no código:
Às vezes, o segmento de reta selecionado dessa forma não é o que contém o x médio visto que pode ser que o segmento de reta mais baixo tenha algum corte de modo que não fique centralizado com o eixo de simetria vertical do bloco, como aconteceu na figura abaixo: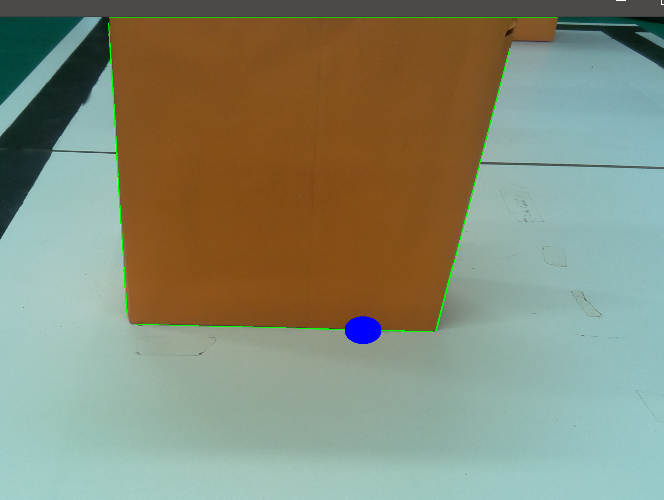
Aqui o ponto médio retornado pela função está marcado em azul.
Sendo assim seria útil passar uma vez procurando qual a altura média do bloco. Depois disso, passar nas retas que tenham y1 e y2 menores que esse valor médio, e anotar o mínimo de x e o máximo de x. Para obter o y do ponto médio do segmento mais baixo, o processo anterior já fornecia bons resultados. O ponto médio retornado por esse nova fórmula de encontrar o x médio, na figura anterior, está representado abaixo: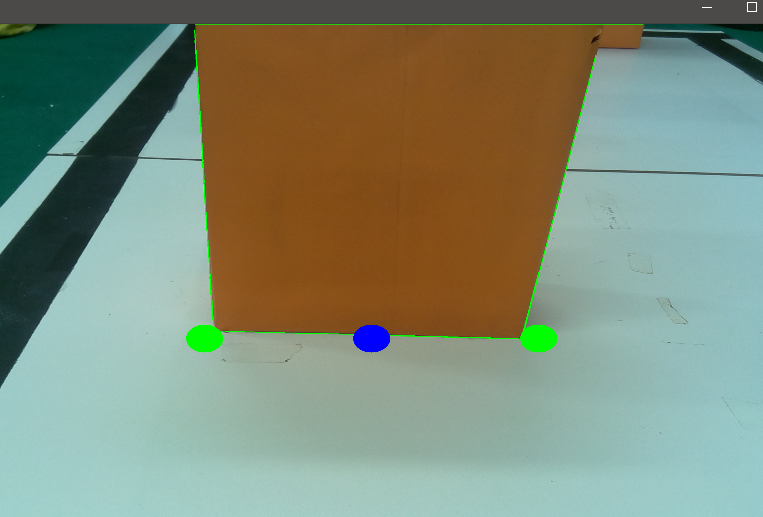
Nele os pontos extremos das linhas médias detectadas estão marcados em verde. Essa mudança deverá ser implementada nos códigos de 2021.
Atualizado por André Vidal há quase 5 anos · 5 revisões