Decisao desvio¶
É apenas uma função criada para fins de teste e retorna sempre 1 (Girar para a esquerda). Porém, encontra-se implementada no arquivo turn.py com o nome rotate().
O objetivo da função rotate() é retornar o lado que o robô deve girar para desviar do obstáculo: 1 para a esquerda, 2 para a direita e 0 para continuar andando. Para isso, calcula-se as distâncias do objeto até as bordas e os ângulos de inclinação das retas, e então analisa-se 3 situações: se alguma das distâncias for maior que uma distância mínima d_min para ultrapassá-lo, se uma das retas tiver ângulo agudo maior do que o da outra acrescido de 10º, e se alguma das distâncias for maior que a outra.
Primeiramente, a função obtém a imagem tirada pela câmera, por meio da biblioteca picamera, e a salva no path '/home/pi/image.jpg'. Depois, duas funções são chamadas: xy() e edge(). A primeira utiliza a imagem salva para detectar o obstáculo e retornar as coordenadas (x,y) do centro da linha mais baixa do objeto. Já a segunda, utiliza a imagem para detectar as bordas laterais mais internas à pista e retornar seus coeficientes de reta na forma das listas poly_left e poly_right(poly_left0 = coef. angular, poly_left1 = coef. linear análogo para poly_right). Junto disso, é retornado um valor j, sendo j = 1 para linha central (as duas bordas foram detectadas), j = 2 para apenas a borda da direita, j = 3 para apenas a borda da esquerda e j = 0 para nenhuma borda detectada.
Se o retorno da função xy() for (0,0), então o robô não detectou obstáculo e retorna 0 (Andar). Caso contrário, analisa-se o valor de j: para j = 1, faz-se a análise das duas bordas, enquanto que para j=2 ou j=3, faz a análise de uma só borda.
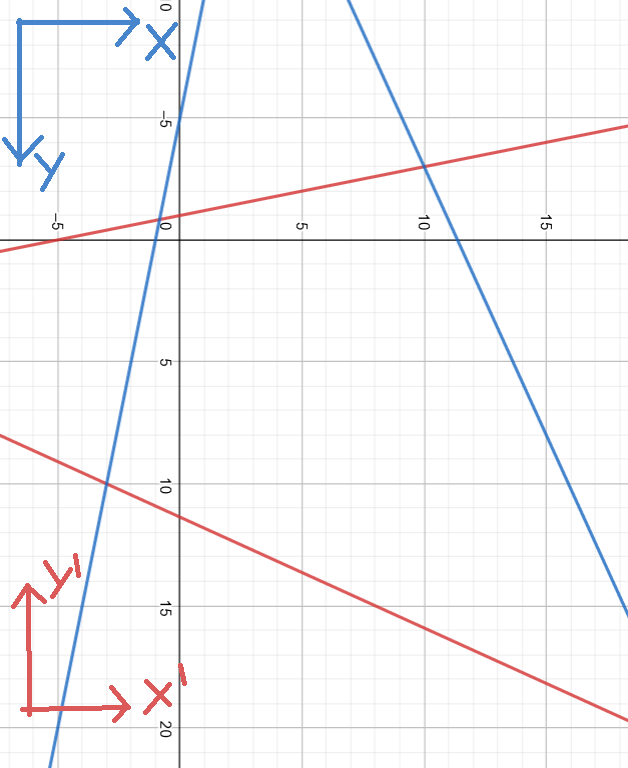
Antes de prosseguir, é preciso saber que as coordenadas cartesianas utilizadas são diferentes das usuais: o eixo y é invertido de forma que o ponto (0,0) está no canto superior esquerdo da imagem. Então, é feita uma mudança de eixos (x', y') = (y, x) em ambas as retas, de modo que trocar os eixos é equivalente a girar o gráfico 90º à esquerda, transformando-o nos eixos cartesianos usuais.
Assim, as listas poly_left e poly_right são substituídas por poly_inv_left e poly_inv_right, que representam as mesmas retas depois da mudança de eixos.
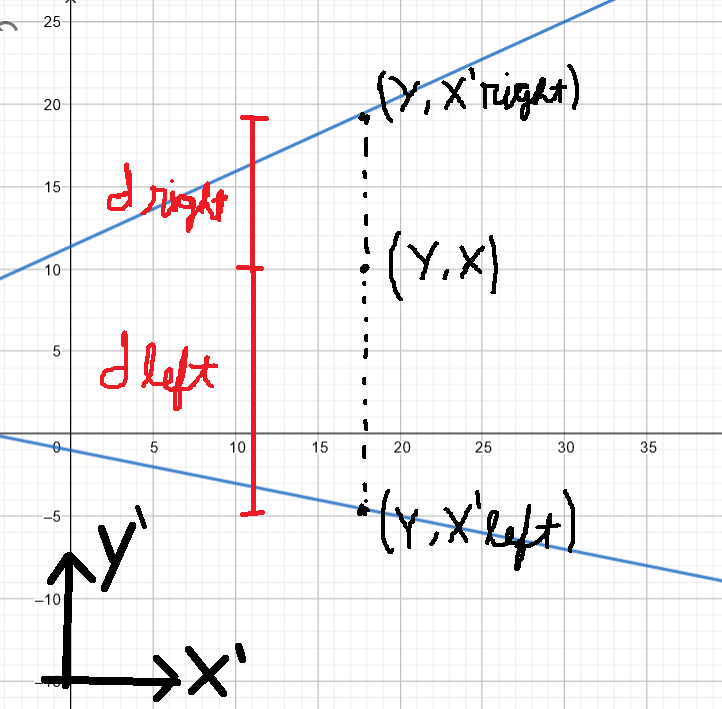
Em seguida, é calculado x_linha_left e x_linha_right colocando o valor de x' como y do centro nas equações das retas depois de convertidas nos eixos x' e y'. |x - x_linha_left| = d_left e |x - x_linha_right| = d_right , serão as distâncias das bordas laterais até o centro do obstáculo.
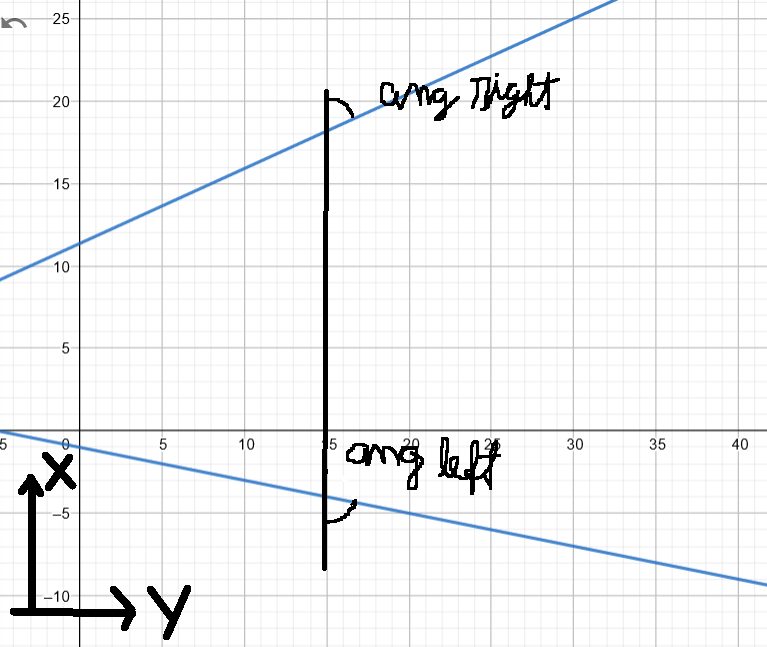
Também é calculado os ângulos agudos de inclinação das retas (ang_left e ang_right) usando a função math.atan()
Depois, os casos são separados para cada valor de j.
- j = 1 (duas bordas detectadas):
- Um dos ângulos é maior que o outro acrescido de 10º:
- A distância da reta até o objeto é maior que d_min: retorna tal lado.
- Caso contrário: O outro lado é escolhido
- Os ângulos não são discrepantes um do outro:
- Ambos os lados são maiores que d_min: retorna o lado de maior distância até o objeto
- Apenas um dos lados é maior que d_min: retorna o lado em que a distância é maior que d_min
- Caso contrário: retorna o lado de maior distância até o objeto
- Um dos ângulos é maior que o outro acrescido de 10º:
- j = 2 ou j = 3 (apenas uma borda foi detectada):
- A distância calculada para o lado é maior que d_min: retorna tal lado.
- Caso contrário: retorna o outro lado.
j = 0 (nenhuma borda detectada):
*Não há nada escrito para este caso. Seria bom implementar algo para evitar bugs.
obs 1: a variável x_robot é uma variável auxiliar que é utilizada na cadeia de if's.
obs 2: as variáveis x_linha_left, x_linha_right, poly_inv_left e poly_inv_right são substituídas por apenas poly_inv e x_linha para o caso em que há só uma borda.
Atualizado por André Vidal há quase 5 anos · 11 revisões