Conexão e uso do VL53L0X » Histórico » Revisão 2
« Anterior |
Revisão 2/3
(diff)
| Próximo »
André Vidal, 26/09/2021 22:49 h
Conexão e uso do VL53L0X (distância)¶
Pinagem¶
Ligar o Vcc da placa no 3v3 (pino 1 da rasp)
O Gnd no Gnd (pino 6 da rasp)
O SCL na GPIO03 (pino 5 da rasp)
O SDA na GPIO03 (pino 3 da rasp)
Após isso, apontar sensor para a frente (parte amarela voltada para a frente).
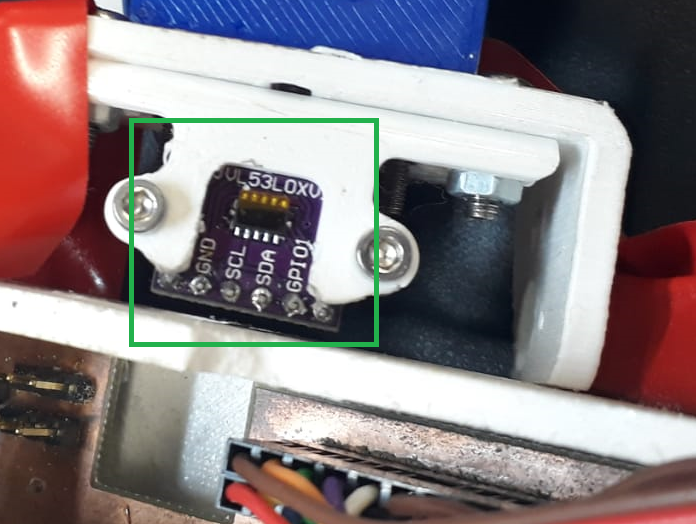
Parte amarela se encontra abaixo do rótulo com o nome do sensor
Bibliotecas.¶
A área de trabalho da raspberry encontra-se configurado para poder importar a biblioteca VL53L0X.py, mas se ele não estiver, deve-se fazer o seguinte:
sudo apt-get install build-essential python-dev
cd "pasta que voce quer usar"
git clone https://github.com/johnbryanmoore/VL53L0X_rasp_python.git
cd VL53L0X_rasp_python
make
Na pasta criada terá um readme, além de outras pastas necessárias. Um exemplo que mostra como elas são necessárias, é que na VL53L0X.py, na linha 68, ele precisa acessar um arquivo lá de dentro:
tof_lib = CDLL
Além disso, na pasta "python" há um arquivo chamado VL53L0X_example.py, que mostra a implementação do sensor:
VL53L0X.VL53L0X, que inicia o objeto
start_ranging(VL53L0X.VL53L0X_BETTER_ACCURACY_MODE), método que configura as medições
get_distance(), método que guarda na variável distance o valor da medida em milímetros
Um erro comum é obter "Interface error", cujo código é 20. Ele foi resolvido trocando os jumpers usados, então provavelmente foi um erro de mal contato. Ao pesquisar na internet, foi encontrado que outra forma de resolvê-lo é cortando a energia dele e religando-a depois.
Mais informações em: <http://www.pibits.net/code/raspberry-pi-and-vl53l0x-time-of-flight-example.php>
Atualizado por André Vidal há quase 5 anos · 2 revisões