Ações
Conexão e uso do RTIMU¶
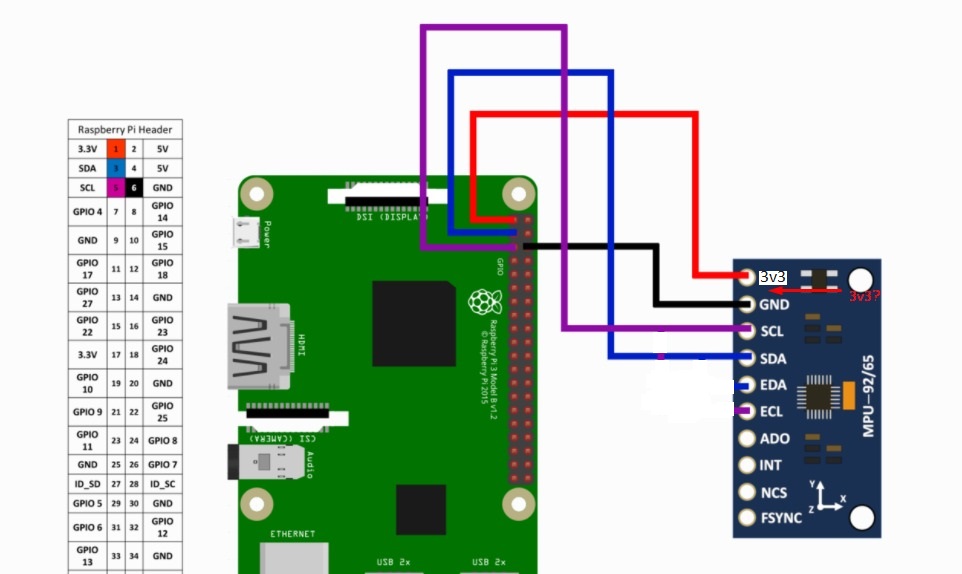
- Conexões na raspberry: Conectar os 4 fios na placa como na imagem
- Calibração da IMU:
- Entrar na raspberry pelo terminal seguindo o tutorial "Acesso dos arquivos na Rasp"
- Ir para o diretório "home\pi\RTIMULib2\Linux\RTIMULibCal\Output"
- Digite RTIMULibCal
- Digite 'm' para iniciar a calibração do magnetômetro:
Tome um eixo de referência e aponte o sensor para ele. Após isso, gire uma volta completa em torno do eixo. Aponte-o na direção oposta e repita o processo. Faça o mesmo para os demais eixos. - Digite 's' para salvar ou 'r' para resetar a medição.
- Digite 'e' para iniciar a calibração do elipsoide:
Coloque o robô em pé em alguma direção. Faça com que ele dê um mortal. Mude a direção de um pequeno ângulo e repita o processo até ele voltar para a direção inicial. - Digite 's' para salvar ou 'r' para resetar a medição.
- Digite 'a' para iniciar a calibração do acelerômetro:
Escolha uma direção, digite 'e' para ativar a calibração e movimente o robô para frente e para trás. Digite 'd' para desativar a calibração e aperte espaço para trocar o eixo. Repita o processo para os demais eixos. Digite 'r' para resetar um dos eixos, se for preciso. - Digite 's' para salvar
- Digite 'x' para sair.
Obs: Os valores encontrados para máximo e mínimo em cada calibração devem ser de sinais opostos e valor absoluto próximo.
- Teste do sensor com código em python
- Crie um arquivo teste no modelo do arquivo "giroscopio.py" em anexo. Este código printa na tela o ângulo yaw detectado pelo sensor.
- Mova o arquivo para a raspberry usando WinSCP seguindo o tutorial "Acesso dos arquivos na Rasp"
- Abra no terminal da raspberry e execute o arquivo.
Obs: A função IMUread() não retornou nenhuma leitura no teste feito em 26/09/21, assim nenhum ângulo é recebido. No caso de também dar pau, falar com o Seppe.
Atualizado por Ebert Melo há quase 5 anos · 1 revisões