Atividade #963
FechadaModelamento de Conjunto Motriz 2019.1
Descrição
Criar novo conjunto motriz, verificando viabilidade de mais uma camada de rodilhas e utilização de engrenagem externa
Arquivos
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Atualizado por Yugo Nihari há mais de 7 anos
- Arquivo Diametro omni antigo.JPG Diametro omni antigo.JPG adicionado
- Arquivo Diametro omni novo.JPG Diametro omni novo.JPG adicionado
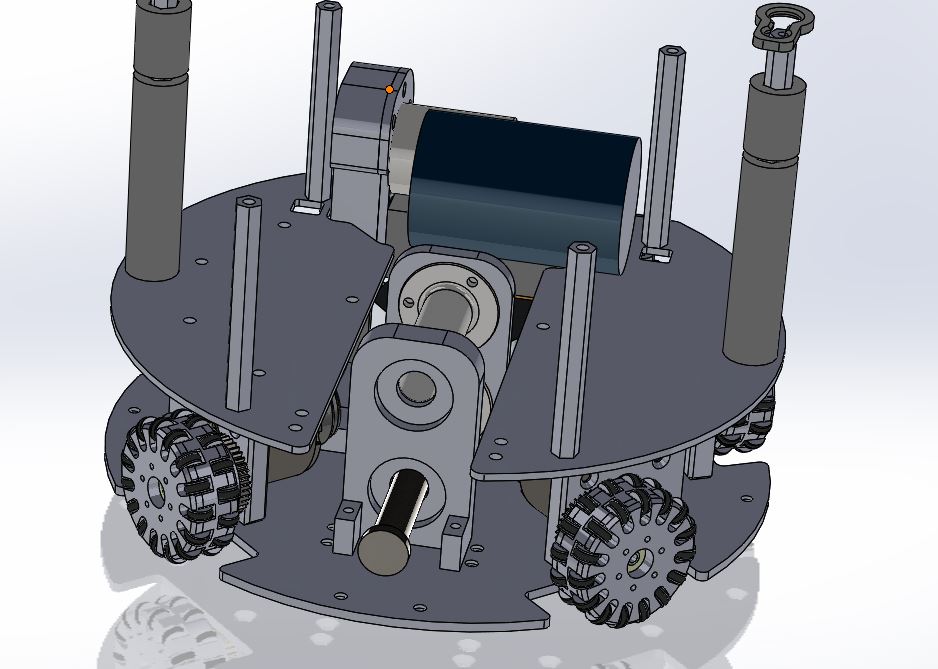
- Arquivo Conjunto motriz 2019.1 Imagem 1.JPG Conjunto motriz 2019.1 Imagem 1.JPG adicionado
- Data prevista alterado de 10/02/2019 para 15/03/2019
Comecei a modelagem do novo conjunto motriz. A ideia é utilizarmos uma das engrenagens que vem na caixa de redução do motor evitando a necessidade de encomendar novas (a mesma que aproveitamos no driblador). A engrenagem que podemos utilizar é a que tem 40 dentes. Atualmente a engrenagem interna que utilizamos (que foi usinada na imbel) tem 80 dentes. Isso dobraria nossa velocidade máxima e reduziria o torque pela metade, o que provavelmente deixaria o robô pouco ágil. Para amenizar isso reduzi o diâmetro da roda de 57,6 para 38,4mm (aumentando o torque em 1,5x). Compondo as reduções, ficamos com a velocidade máxima 1,3x maior (e 75% do torque). A viabilidade disso está para ser vista pela Elo. O Onias disse que precisa da resposta degrau do robô para otimizar as constantes PID e descobrirmos a aceleração máxima real do robô.
Desenhei a roda com 2 camadas de rodilhas, havendo agora um corpo da roda central. No total ficamos com 30 rodilhas. Reduzi o tamanho delas também e o o-ring previsto para ser utilizado é o Parker 2-006 (https://www.parker.com/literature/o_ring.pdf)
Estou agora redesenhando o suporte do motor. A dificuldade será fazer o acoplhamento da engrenagem. Ela tem um furo de 6mm mas acredito que podemos aumentar esse furo para uns 10mm. Ainda estou pensando como fazer a montagem disso conciliando com o tamanho do eixo e dos rolamentos possíveis de se utilizar.
Major, o senhor acha viável a produção dessas peças nesse semestre?
Atualizado por Luiz Renault Leite Rodrigues há mais de 7 anos
Bom trabalho. Mande os arquivos da roda em STL para que possa imprimir aqui na IMBEL e testar a distância das rodilhas / tamanho da roda. Se quiser, coloco os suportes também.
Atualizado por Yugo Nihari há mais de 7 anos
- Arquivo Conjunto motriz 2019.1 Imagem 2.JPG Conjunto motriz 2019.1 Imagem 2.JPG adicionado
- Arquivo Conjunto motriz 2019.1 Imagem 3.JPG Conjunto motriz 2019.1 Imagem 3.JPG adicionado
- Arquivo Conjunto motriz 2019.1 no robô.JPG Conjunto motriz 2019.1 no robô.JPG adicionado
- Arquivo Conjunto motriz 2019.1 vista em corte.JPG Conjunto motriz 2019.1 vista em corte.JPG adicionado
- Arquivo Rodilha com eixo próprio.JPG Rodilha com eixo próprio.JPG adicionado
Fiz o acoplamento da engrenagem e dos 3 corpos da roda com 6 parafusos M2x20 escareados.
Desenhei os 3 corpos de tal forma que seja possível dispensar o uso de gabarito na usinagem. A ideia é usar uma castanha para prender cada corpo na parte circular que foi prolongada dos corpos.
A roda fica apoiada no eixo por dois rolamentos 638/4-2Z, que é o mesmo usado no driblador. Com isso todos os rolamentos do robô serão iguais. (https://www.skf.com/br/products/bearings-units-housings/ball-bearings/deep-groove-ball-bearings/deep-groove-ball-bearings/index.html?designation=638/4-2Z&unit=metricUnit)
As rodilhas não rodam mais em torno de um aro. O eixo agora faz parte dela e fica em contato com os próprios corpos da roda.
Deixei 0,2mm de folga no final do eixo do suporte do motor para evitar o problema ocorrido na versão anterior, que fazia necessário o uso de arruelas para não haver carregamento axial no rolamento. Haverá um parafuso M3x20. Como o parafuso é de aço ele ajudará a suportar o carregamento na porção final do eixo que tem apenas 3,85mm de diâmetro externo.
A posição do eixo e do motor no suporte do motor ainda não está definida. As contas para calcular o diâmetro primitivo das engrenagens parece errada então essa semana vou verificar com o Luis Farias.
O motor foi levado para baixo em relação à versão anterior. Essa mudança vai ser muito boa para a estabilidade do robô. Atualmente há interferência com as guias do chute mas o sistema de chute será refeito e estamos analisando a viabilidade de utilizar ranhuras no chassi como guia do chute.
Atualizado por Yugo Nihari há mais de 7 anos
- Arquivo Montagem-Gabarito da engrenagem.JPG Montagem-Gabarito da engrenagem.JPG adicionado
- Arquivo Conjunto motriz corte 26-02.JPG Conjunto motriz corte 26-02.JPG adicionado
- Arquivo Caixa de redução 1.jpeg Caixa de redução 1.jpeg adicionado
- Arquivo Caixa de redução 2.jpeg Caixa de redução 2.jpeg adicionado
- Arquivo Engrenagem-furo escareado.JPG Engrenagem-furo escareado.JPG adicionado
- Arquivo Corpo da roda central.STL Corpo da roda central.STL adicionado
- Arquivo Corpo da roda externo.STL Corpo da roda externo.STL adicionado
- Arquivo Corpo da roda interno.STL Corpo da roda interno.STL adicionado
- Arquivo Gabarito para engrenagem.STL Gabarito para engrenagem.STL adicionado
- Arquivo Rodilha 2019.STL Rodilha 2019.STL adicionado
Junto com o Luis Farias analisamos as engrenagens. O que estava estranho é que a partir do diâmetro externo e do número de dentes era para encontrarmos o valor do módulo (padrão SI) ou o passo diametral (padrão americano), mas os valores estavam sendo quebrados.
Tiramos então a medida a partir da própria caixa de redução e vimos que essas engrenagens não possuem adendo padrão. Por sorte na caixa de redução existe uma transmissão exatamente igual à que vamos utilizar:10 dentes para 40 dentes, então temos certeza que a medida que precisamos é aquela que medimos no paquímetro. Havia pequena incerteza pois precisamos medir a distância entre o centro de dois eixos, mas o valor de 12,5mm ficou claro quando verificamos o módulo=0,5
Eu havia esquecido de considerar o escareado nas engrenagens, mas já adaptei o conjunto para ser possível.
O parafuso M3x20 agora vai quase até o motor, então deixei o furo passante.
Estou avaliando uma proteção para a engrenagem não pegar poeira mas ainda não desenvolvi bem a ideia. Por enquanto vou deixar sem.
Fiz o gabarito para fazer os furos na engrenagem. Ele possui uma tampa para pressionar a engrenagem e evitar sua rotação. O ideal é que esse gabarito seja de aço mas acho que podemos fazer um impresso para testar o conjunto. A tampa não precisa de precisão então vou imprimir por fdm.
Major, anexo estão os seguintes stls. Vou anexar o suporte do motor em seguida porque não estou conseguindo anexar mais um arquivo:
-Corpo da roda interno
-Corpo da roda externo
-Corpo da roda central
-Gabarito para engrenagem
-Rodilha 2019
A rodilha tem paredes de 0,45mm então não sei se vai ser possível imprimir. Mas caso o senhor ache que vale a pena tentar são 30 dela para formar um conjunto motriz.
Atualizado por Yugo Nihari há mais de 7 anos
- Arquivo Suporte do motor 2019.STL Suporte do motor 2019.STL adicionado
Anexo o suporte do motor para impressão.
Atualizado por Yugo Nihari há mais de 7 anos
- Arquivo Vista robo 15-03.JPG Vista robo 15-03.JPG adicionado
- Arquivo Robo-vista superior 15-03.JPG Robo-vista superior 15-03.JPG adicionado
- Arquivo Base superior dividida 15-03.JPG Base superior dividida 15-03.JPG adicionado
- Arquivo furacao-suporte motor.JPG furacao-suporte motor.JPG adicionado
- Arquivo Protecao da engrenagem-chassi.JPG Protecao da engrenagem-chassi.JPG adicionado
O Luis Farias e o Bozza levantaram a possibilidade de rotacionar os motores em torno do eixo da roda com o intuito de ganhar mais espaço para as placas de chute. Fiz essa modificação e algumas outras que foram necessárias. Vínhamos tentando manter certa compatibilidade com o robô anterior mas com essas mudanças não será possível. Ainda assim, julgo que são mudanças positivas para o projeto e que compensam. A montagem atual do robô está assim:
Rotacionar todos os motores para o centro trouxe diversas vantagem:
-diminuição da massa dos suportes dos motores
-possivelmente contribuiu para abaixar o cg do robô (todos os motores foram para baixo e o capacitor para cima)
-mais espaço vertical para a bateria
-a eletrônica pode ser levada mais para baixo, havendo possibilidade de caber uma antena (elo precisa passar os requisitos para avaliarmos)
-solenóide está com mais espaço para o enrolamento do fio esmaltado
Desvantagens:
-existem agora dois tipos de suporte do motor, sendo um o espelho do outro.
-a base superior ficou na direção do solenóide superior. Tive então que separá-la em 2. Estava com a ideia de fazer essa base impressa para redução de massa do robô mas agora com ela dividida em 2 vamos ter que reavaliar/imprimir e testar. Talvez imprimir em abs seja suficiente.
-o capacitor agora está perto do motor do driblador. Há assim um acúmulo de massa na parte frontal do robô, o que aumenta o risco do robô tombar. É importante conferir logo a massa das peças no SolidWorks e através do cg do robô calcular sua desacelação máxima.
Mais algumas considerações:
Um problema que estávamos enfrentando era referente à localização dos furos do suporte do motor no chassi e na base superior. As cotas que definiam essa posição eram dependentes de outras partes e havia referências quebradas de montagens anteriores. Refiz a base superior utilizando novas referências. Sobre as furações do suporte do motor, agora são definidas a partir do centro do robô, conforme imagem a seguir:
Explicação: a linha que une as duas furações de cada suporte fica a 62,3mm do centro do robô. O ponto médio dos furos é deslocado 10mm em relação ao eixo da roda, referente à modificação feita no posiconamento dos motores. Por questão de simplicidade a posição dos furos da base superior e do chassi é igual.
Prolonguei o chassi para proteger a engrenagem de poeira
Falta desenhar a peça que irá segurar o capacitor (Atividade #971)
Falta ajeitar os furos na base superior para passagem dos fios do sensor/led
Atualizado por Yugo Nihari há mais de 7 anos
- Arquivo Prototipo conjunto motriz completo.jpeg Prototipo conjunto motriz completo.jpeg adicionado
Com as peças impressas fiz a montagem do chassi+conjuntos motriz+base superior.
Para não ter que esperar pelo suporte do motor usinado fiz um improviso nele, imprimindo apenas a parte de maior diâmetro do eixo e envolvendo o parafuso de 3mm com fita até completar os 4mm dos rolamentos dentro da roda.
Levei o conjunto para o pirf mas a elo teve problemas e não foi possível testar a movimentação em campo. O Guilherme soldou hoje os fusíveis na placa antiga para podermos testar. A equipe optou por não utilizar as 5 placas atuais que estão montadas e funcionando nos robôs, para não correr o risco de danificá-las. Só serão utilizadas para testes caso nenhuma placa antiga funcione.
A furação que fiz na base superior não está alinhada com os furos da eletrônica. Tenho que verificar o porquê disso ter ocorrido.
Atualizado por Yugo Nihari há mais de 7 anos
- Arquivo TDS-carbon-en.pdf TDS-carbon-en.pdf adicionado
- Arquivo TitanX - TDS - Formfutura.pdf TitanX - TDS - Formfutura.pdf adicionado
- Arquivo XTCF20 e Titan X.JPG XTCF20 e Titan X.JPG adicionado
Encontrei dois materiais interessantes para serem feitos os corpos das rodas omni. Um deles chama XT CF20 e é um filamento composto por petg e 20% em fibra de carbono. O outro material chama Titan X e é um filamento de ABS aprimorado.
O XT CF20 possui as melhores resistências a flexão e tração, além de alto módulo de flexão (a deformação será menor para uma dada carga aplicada). O petg tem como característica resistência à fadiga, propriedade que seria interessante para as rodas.
O Titan X também tem ótima resistência a flexão e tração mas o seu diferencial está na resistência ao impacto. Apesar de ser um tipo de ABS ele não empena e tem ótima adesão entre camadas.
Pelo datasheet dos dois não é possível comparar as resistências ao impacto porque no XT CF20 é feito teste Isod e no Titan X é feito Sharpy, mas como referência, o PLA convencional da Polymaker tem resistência ao impacto (Sharpy) de 2,7kJ/m^2 e o PLA Polymax (pla aprimorado) de 12,2kJ/m^2 (Ano passado usei o Polymax para fazer a placa de chute do goleiro, o protótipo da placa de chute rasteira e alguns robôs do vss). Já do Titan X o valor é de 58kJ/m^2.
Sobre a resistência ao impacto pelo teste Isod, comparei o XT CF20 com o PLA e o ABS da Ultimaker. A resistência do PLA é 5,1kJ/m^2, do ABS é 10,5kJ/m^2 e do Titan X é 6kJ/m^2. Isto é, maior do que de um PLA mas menor do que de um ABS.
Sobre a densidade, a do Titan X é 1,1g/cm^3 e do XT CF20 é 1,35g/cm^3. Os 3 corpos da roda juntos têm 9,45g/cm^3 atualmente, então pesariam aproximadamente:
10,4g em Titan X
12,8g em XT CF20
25,5g em Alumínio (2,7g/cm^3)
A seguir uma comparação dos dois (anexo os dois pdfs):
Resumindo:
-XT CF20 se destaca pela alta resistência a tração, flexão, fadiga e rigidez.
-Titan X se destaca pela alta resistência ao impacto e menor densidade. Poderia ser usado também para a placa de chute.
Tenho um amigo que vem da França dia 25/04 e pode trazer os filamentos. 750g do Titan X custa €34,5 e 750g do XT CF20 custa €50 (Frete de graça acima de €48). Comprando um carretel de cada podemos testar e, se der certo, servirá para fazer todos os omnis e placas de chute.
Major, o que o senhor acha? Podemos comprar?
Atualizado por Luiz Renault Leite Rodrigues há mais de 7 anos
Acho que podem testar. Mas o valor é bem acima do alumínio.
Atualizado por Yugo Nihari há aproximadamente 7 anos
- Arquivo omni impresso 1.JPG omni impresso 1.JPG adicionado
- Arquivo Omni impresso-frontal.JPG Omni impresso-frontal.JPG adicionado
- Arquivo omni impresso vista explodida.JPG omni impresso vista explodida.JPG adicionado
- Arquivo Omni impresso interno.jpeg Omni impresso interno.jpeg adicionado
- Arquivo Omni impresso Luis Farias 1 .jpeg Omni impresso Luis Farias 1 .jpeg adicionado
- Arquivo Corpos omni Yugo.jpeg Corpos omni Yugo.jpeg adicionado
- Arquivo Rodilha 2019.1 - IMPRESSA - O-Ring .STL Rodilha 2019.1 - IMPRESSA - O-Ring .STL adicionado
O Luis Farias modificou o conjunto do omni para que ele seja impresso e corrigiu o que observamos que deveria ser melhorado em relação ao primeiro protótipo.
-Os ressaltos feitos para a usinagem em fresadora foram retirados;
-As folgas foram aumentadas
-Percebemos que aquela ideia de fazer o eixo da rodilha ser rotativo estava gerando muito atrito. Optamos pela utilização de eixos de aço BWG 16 (1,65mm)
-As rodilhas estão mais externas em relação aos corpos da roda para evitar que os corpos arrastem no feltro. Para isso diminuimos o número total de rodilhas para 20. Elas estão maiores também, usando o-ring 2-008. Com essa mudança as paredes dos corpos ficaram mais resistentes também.
O Luis Farias imprimiu um conjunto, incluindo rodilhas (uma versão sem o-ring para testar). Eu imprimi o corpo externo e interno mas estou tendo problemas de empenamento com o central. Isso não faz muito sentido porque a primeira camada dele é igual a do corpo interno. Felizmente pelo que li o XT-CF20 não tem tendência a empenar, mas ainda vou resolver essa questão de um protótipo em PLA.
Pelo que imprimimos em PLA vimos que as peças estão ficando bem robustas.
Major, pode imprimir as rodilhas para testarmos com o tamanho novo? Poderia ser 85 rodilhas (20 por omni+5 reservas)? Anexo está o stl
Atualizado por Yugo Nihari há aproximadamente 7 anos
- Arquivo Omni impresso XT-CF20 3.jpeg Omni impresso XT-CF20 3.jpeg adicionado
- Arquivo Omni impresso XT-CF20 2.jpeg Omni impresso XT-CF20 2.jpeg adicionado
- Arquivo Omni impresso XT-CF20 1.jpeg Omni impresso XT-CF20 1.jpeg adicionado
A impressão da roda com o XT-CF20 deu certo. As peças aderiram bem à superfície e não empenou nada. Vamos montar esse conjunto e dando certo podemos fazer 4 para testar em campo.
Atualizado por Yugo Nihari há aproximadamente 7 anos
- Arquivo Cavidade eixo rodilha.JPG Cavidade eixo rodilha.JPG adicionado
- Arquivo Corpo central-alteracao.JPG Corpo central-alteracao.JPG adicionado
- Arquivo Conjunto motriz 100519.jpeg Conjunto motriz 100519.jpeg adicionado
Fiz a montagem do conjunto com os rolamentos, um eixo de aço, uma rodilha impressa, 3 parafusos M2x20 e 3 porcas. Cometi o erro na hora de gerar o gcode e utilizei os arquivos errados do corpo central e do corpo externo.
A diferença para a peça mais recente era que a espessura do corpo externo mais recente era de 2,8mm e imprimi um de 3mm. Além disso a espessura do corpo central mais recente era 0,4mm menor e a cavidade do eixo foi aumentada para evitar que ele saia.As alterações na espessura visaram permitir a utilização do parafuso M2x20 com a porca.
Apesar dessas diferenças foi posssível montar o conjunto. O parafuso chegou a rosquear a porca, mas senti que para evitar que a rosca seja espanada mais alguns décimos de rosqueamento vão ajudar.
Os rolamentos nos corpos externo entraram na medida certa, apenas com um pouco de pressão. No corpo central foi necessário um pouco mais de força, e pelo fato de um dos lados alojar completamente o rolamento aumentei 0,05mm para facilitar eventual troca de rolamento.
Fiz uma alteração no corpo central para topar melhor o rolamento, conforme imagem a seguir:
Resumindo, apesar de ter impresso uma versão anterior, as medidas que o Luis Farias ajeitou para o conjunto impresso estão muito boas. Estou imprimindo o conjunto correto com essas últimas modificações. Com isso poderemos testar a montagem com rodilhas impressas com o-ring e depois produzir 4 conjuntos.
Atualizado por Yugo Nihari há aproximadamente 7 anos
- Arquivo Modificação comprimento eixo.jpeg Modificação comprimento eixo.jpeg adicionado
- Arquivo Corpo central-detalhe do defeito.jpeg Corpo central-detalhe do defeito.jpeg adicionado
- Arquivo Defeito 13-05-19.jpeg Defeito 13-05-19.jpeg adicionado
- Arquivo Omni montado 13-05-19.jpeg Omni montado 13-05-19.jpeg adicionado
Montei o conjunto e a movimentação do omni ficou boa.
O que aconteceu foi que uma parte da impressão se soltou do corpo central. Acredito que isso tenha acontecido porque forcei o eixo na medida exata (9mm). Apesar disso o eixo continua preso na cavidade e esse conjunto pode ser usado para testar a movimentação no campo.
Diminui o comprimento do eixo de 9mm para 8mm. Conforme imagem a seguir, agora o contorno da impressão passa por toda a parte externa da roda. Antes, pelo fato das dimensões serem muito reduzidas, estavam sendo feitas várias ilhas, que deixaram a peça menos resistente
Além disso também diminiui o diâmetro da cavidade de 2,05mm para 1,9mm, para alojar de forma mais justa o eixo de 1,65mm.
Major, podemos testar esse conjunto em campo já. O senhor pode imprimir mais 60 rodilhas? Não precisa imprimir extras porque já estou com 10 sobrando aqui.
Atualizado por Luiz Renault Leite Rodrigues há aproximadamente 7 anos
Estou com mais 30 impressas aqui.
Atualizado por Yugo Nihari há aproximadamente 7 anos
Luiz Renault Leite Rodrigues escreveu:
Estou com mais 30 impressas aqui.
Ok! Obrigado!
Atualizado por Yugo Nihari há aproximadamente 7 anos
- Arquivo Suporte do motor 200519.jpeg Suporte do motor 200519.jpeg adicionado
- Arquivo Prototipo 2.jpeg Prototipo 2.jpeg adicionado
- Arquivo Omni 2 engrenagens.jpeg Omni 2 engrenagens.jpeg adicionado
- Arquivo Omni 2 frente.jpeg Omni 2 frente.jpeg adicionado
Estou terminando de montar o segundo protótipo do omni.
Algumas observações:
-Os eixos das rodilhas têm entre 7,40mm e 7,65mm;
-Os 6 furos das engrenagens ficaram certos só em uma delas, provavelmente a primeira a utilizar o gabarito impresso. Nas outras não consegui passar os 6 parafusos. Optei por deixar apenas 3 parafusos nessas para não desbalancear a roda.
-Estou imprimindo com abs. Tomando cuidado foi possível fazer a rosca no eixo do suporte do motor sem quebrá-lo.
Com a montagem parcial em mãos não me parece ser viável fazer as hastes e a base superior impressas pois a estrutura não está ficando muito rígida.
Major, passei em São Cristóvão hoje e a loja que costumamos comprar rolamentos está com falta do rolamento que precisamos. Posso tentar encomendar 90 rolamentos? Eles disseram que talvez consigam com outro fornecedor. Vou tentar negociar abaixo de 5 reais a unidade.
Atualizado por Yugo Nihari há mais de 5 anos
- Situação alterado de Em andamento para Resolvida
Atualizado por Yugo Nihari há mais de 5 anos
- Situação alterado de Resolvida para Fechada