Atividade #496
FechadaEscolha de Motor
Arquivos
{kind=link}
{kind=link}
Atualizado por João Bacelar há mais de 8 anos
- Título alterado de Escolha de para Escolha de Motor
- Data prevista ajustado para 22/12/2017
- Prioridade alterado de Normal para Alta
A partir de quatro opções de motores explicitados abaixo escolher qual será adotado, tendo em vista tamanho, velocidade máxima, potência, se é usado por outras equipes, preço entre outros aspectos.
Vê-se também a necessidade do uso de um encoder para melhor controle de velocidade do robô, usando apenas os dados da visão, devido ao tempo de processamento de imagem, os resultados não seriam os melhores.
Lendo os TDPS das equipes chegamos a um modelo usual adotado por elas que usamos como base das pesquisas. Para o cálculo da velocidade máxima usei uma roda de raio 40 mm.
Os motores são:
1. Pololu
50:1 Micro Metal Gearmotor LP 6V com eixo estendido, sem encoder.
-Comprimento: 40,9 mm
-Tensão 6V
-250 rpm , 1,04 m/s (rolagem livre) / caixa de redução 50:1
-Torque (Stall torque) 0,5 Kg.cm / 7 oz-in
-Valor: 16,95 dólares
-link: https://www.pololu.com/product/2203/specs
-encoder(óptico):
-Valor: 8,95 dólares o par
-Tensão: 3,3 V
-Opções de 20 ou 12 amostras por revolução
-Link: https://www.pololu.com/product/2591
2.Chihai CHF-GM12-N20VA(com encoder)
-Comprimento: 42,7 mm
-Tensão 6V
-350 rpm , 1,46 m/s (caixa de redução 30:1) / Stall Torque: 0,3kg.cm
-210 rpm, 0,87 m/s (caixa de redução 50:1) / Stall Torque: 0,5kg.cm
-encoder 3,3 V ou 5V, 7 pulsos por revolução.
-Valor: 36,27 reais
-link: https://pt.aliexpress.com/item/Chihai-Motor-CHF-GM12-N20VA-DC-6V-12V-7PPR-Encoder-Motor-Reducer-Carbon-brush-Gear-Motor/32828577797.html
3.DFRobot FIT0482(com encoder)
-Comprimento: 42,2 mm
-Tensão 6V
-310 rpm, 1,29 m/s (caixa de redução 50:1)
-Torque 0,8 kg.cm (instant), 0,35kg.cm (Rated)
-encoder 3,3 V ou 5V, dado de pulsos por revolução não está claro.
-Valor: 12 dólares
-Link: https://www.digikey.com/products/en/motors-solenoids-driver-boards-modules/motors-ac-dc/178?k=dc+micro+motor&k=&pkeyword=dc+micro+motor&pv14=123&pv134=517&pv393=10&pv1491=81&FV=ffe000b2&mnonly=0&ColumnSort=0&page=1&quantity=0&ptm=0&fid=0&pageSize=25
Atualizado por Luiz Renault Leite Rodrigues há mais de 8 anos
Qual a bateria utilizada? Quais as dimensões máximas do robô? Existem limitações de velocidade ou peso máximo?
Atualizado por Luiz Renault Leite Rodrigues há mais de 8 anos
Já está definido modelo de roda? Pelo menos o diâmetro dela?
Montar uma tabela com a velocidade máxima (do robô), torque máximo da roda (ou força máxima sobre o solo), resolução do encoder em ângulo do a roda e em ângulo do robô, considerando movimento puro de rotação do robô. Colocar também uma coluna de dimensões (LxCxA) e outra de custo.
Essas informações darão uma noção do desempenho dos motores aplicados aos robôs.
Atualizado por Gustavo Claudio Karl Couto há mais de 8 anos
- Data prevista alterado de 22/12/2017 para 27/12/2017
- Atribuído para ajustado para João Bacelar
Atualizado por João Bacelar há mais de 8 anos
Luiz Renault Leite Rodrigues escreveu:
Qual a bateria utilizada? Quais as dimensões máximas do robô? Existem limitações de velocidade ou peso máximo?
As dimensões máximas são 7,5 x 7,5 x 7,5 cm, não existem restrições de peso ou velocidade nas regras. Enquanto as baterias pretendemos usar bateria LI-Po 1000 mAh 7,4V, que vimos sendo usada por muitas equipes.
Atualizado por João Bacelar há mais de 8 anos
Luiz Renault Leite Rodrigues escreveu:
Já está definido modelo de roda? Pelo menos o diâmetro dela?
Montar uma tabela com a velocidade máxima (do robô), torque máximo da roda (ou força máxima sobre o solo), resolução do encoder em ângulo do a roda e em ângulo do robô, considerando movimento puro de rotação do robô. Colocar também uma coluna de dimensões (LxCxA) e outra de custo.
Essas informações darão uma noção do desempenho dos motores aplicados aos robôs.
Quanto à roda ainda não definimos o modelo, tinha feito o cálculo diâmetro de 8cm, mas agora vou refazer com diâmetro de 6cm, do modelo de roda descrita no TCC do Johnatan (6cm de diâmetro e 11 gramas).
Vou organizar os dados em tabela , mas não entendi muito bem a resolução do encoder, os dados de resolução são o numero amostras por revolução?
link do TCC do Johnatan: http://sirlab.github.io/assets/pdfs/tcc-johnathan.pdf
Atualizado por Luiz Renault Leite Rodrigues há mais de 8 anos
A resolução do encoder é em pulsos por volta, ou seja, há um ângulo de resolução no eixo do motor. Tem que multiplicar este ângulo pela redução do motor para saber a resolução na roda.
Imagine que o movimento da roda é em ângulos discretos, na resolução do encoder. Isso faria com que o posicionamento do robô também seja discreto. Exagerando, dependendo da resolução do encoder e da relação das engrenagens pode não ser possível apontar o robô para o centro do gol, por exemplo.
Atualizado por João Bacelar há mais de 8 anos
- Arquivo comparativo.png comparativo.png adicionado
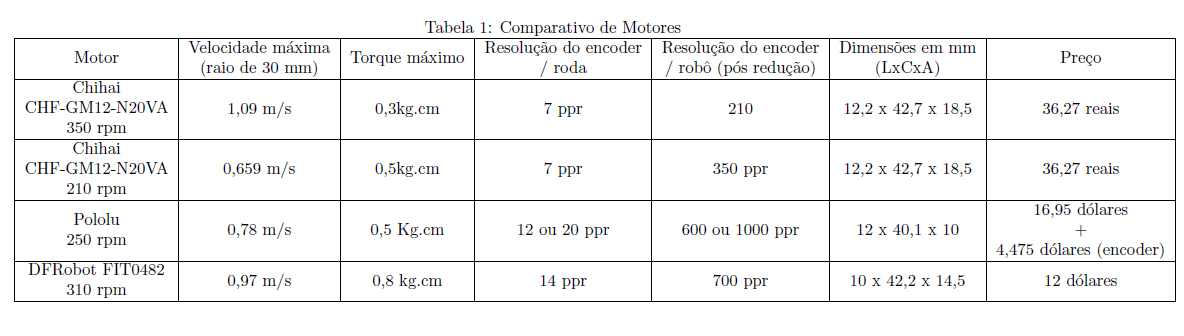
Segue a tabela com o comparativo:

Atualizado por Luiz Renault Leite Rodrigues há mais de 8 anos
O torque da tabela já inclui a caixa de redução ou é apenas do motor?
Atualizado por Luiz Renault Leite Rodrigues há mais de 8 anos
Falta calcular a resolução em ângulo do robô, considerando todo o conjunto motor.
Atualizado por Gustavo Claudio Karl Couto há mais de 8 anos
1. Pololu
50:1 Micro Metal Gearmotor LP 6V com eixo estendido, sem encoder.
Nesse motor da Pololu você pegou o motor low power, dah uma olhada no High Power que é mais interessante pra vocês,
https://www.pololu.com/category/60/micro-metal-gearmotors
Esse aki especificamente, ele tem 625 rpm para 1,1kg.cm
https://www.pololu.com/product/998
Ou esse aki de 400 rpm, e 1,6kg.cm
https://www.pololu.com/product/2361
Ou esse aki 320 rpm, e 2,2kg.cm
Atualizado por João Bacelar há mais de 8 anos
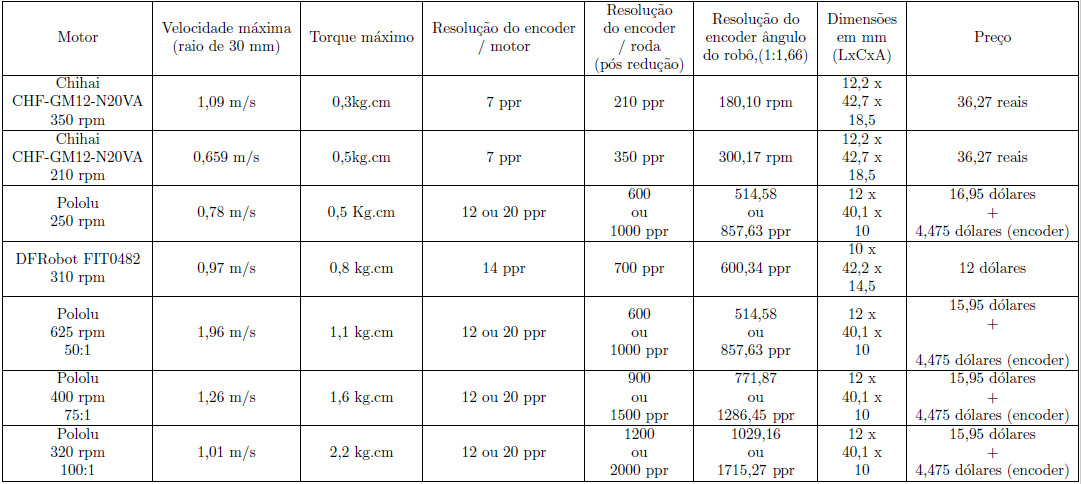
- Arquivo comp_2.png comp_2.png adicionado
Fiz as contas da relação entre uma volta da roda e uma volta do robô em seu eixo, utilizando o raio da roda de 30 mm e distância da roda ao eixo do robô de 35 mm . A relação obtida foi de 1 giro do robô = 1,166 giro da roda.
Já os dados de torque consideram as caixas de redução,apesar de não ficar explícito nos sites, pois apresentam valores variados para o mesmo motor mudando apenas a relação de engrenagens.
Segue a nova tabela, já com os novos motores sugeridos pelo Gustavo.

Atualizado por Gustavo Claudio Karl Couto há mais de 8 anos
| Nome | Data | Dia |
| ------ | -------- | ------- |
| Zero | Um | Dois |
| Três | Quatro | Cinco |
Se puder, Bacelar, adicionar resolução de um chute a um metro,
Modificar o raio do robô para 30cm,
Adicionar aceleração máxima do robô, para isso será necessário estimar o peso do robô, pode pedir ajuda ao Bozza e ao Efísio e usar o peso das peças impressas do ITA, podem usar o repetier host para estimar o peso da impressão,
Adicionar também o tempo que demora para ir de zero a um metro por segundo,
Passar a tabela para markdown e adicionar na tarefa ao invés de usar imagem, pode usar o exemplo da tabela acima, ou usar o site,
Atualizado por João Bacelar há mais de 8 anos
Mudar o raio do robô para 30mm, quer dizer a distância entre as rodas? Porque mudando para 30 dá a mesma relação de giro da roda.
Fiz as contas da imprecisão no chute de 1 m . O ângulo de imprecisão foi calculado dividindo 360 graus pela resolução do encoder em relação ao robô (pulsos por revolução em relação ao giro do robô). Depois multipliquei o seno desse ângulo pela distância de 1m.
Tabela:
| Motor | Velocidade máxima (raio de 30 mm) | Torque máximo | Resolução do encoder / motor | Resolução do encoder / roda (pós redução) | Resolução do encoder ângulo do robô,(1:1,66) | Resolução de um chute a 1m | Dimensões em mm (LxCxA) | Preço |
| :------------------------------: | :---------------------------------: | :-------------: | :------------------------------: | :--------------------------------------------: | :----------------------------------------------: | :----------------------------: | :------------------------: | :----------------------------------------: |
| Chihai CHF-GM12-N20VA 350 rpm | 1,09 m/s | 0,3kg.cm | 7 ppr | 210 ppr | 180,10 ppr | 0,909759 | 12,2 x 42,7 x 18,5 | 36,27 reais |
| Chihai CHF-GM12-N20VA 210 rpm | 0,659 m/s | 0,5kg.cm | 7 ppr | 350 ppr | 300,17 ppr | 0,931793 | 12,2 x 42,7 x 18,5 | 36,27 reais |
| Pololu 250 rpm | 0,78 m/s | 0,5 Kg.cm | 12 ou 20 ppr | 600 ou 1000 ppr | 514,58 ou 857,63 ppr | 0,643911 ou 0,407543 | 12 x 40,1 x 10 | 16,95 dólares + 4,475 dólares (encoder) |
| DFRobot FIT0482 310 rpm | 0,97 m/s | 0,8 kg.cm | 14 ppr | 700 ppr | 600,34 ppr | 0,564362 | 10 x 42,2 x 14,5 | 12 dólares |
| Pololu 625 rpm 50:1 | 1,96 m/s | 1,1 kg.cm | 12 ou 20 ppr | 600 ou 1000 ppr | 514,58 ou 857,63 ppr | 0,643911 ou 0,407543 | 12 x 40,1 x 10 | 15,95 dólares + 4,475 dólares (encoder) |
| Pololu 400 rpm 75:1 | 1,26 m/s | 1,6 kg.cm | 12 ou 20 ppr | 900 ou 1500 ppr | 771,87 ou 1286,45 ppr | 0,449674 ou 0,276202 | 12 x 40,1 x 10 | 15,95 dólares + 4,475 dólares (encoder) |
| Pololu 320 rpm 100:1 | 1,01 m/s | 2,2 kg.cm | 12 ou 20 ppr | 1200 ou 2000 ppr | 1029,16 ou 1715,27 ppr | 0,34271 ou 0,208342 | 12 x 40,1 x 10 | 15,95 dólares + 4,475 dólares (encoder) |
Vou fazer as contas da aceleração junto com o Bozza e Efísio.
Atualizado por Luiz Renault Leite Rodrigues há mais de 8 anos
180 ppr = 2 graus de resolução.
Sin(2 deg)= 0,035 (3,5 cm).
Qual a massa estimada do robô?
Atualizado por João Bacelar há mais de 8 anos
Peso do robô : estrutura 108 g usando o modelo do time do ITA impresso no laboratório, com cada motor variando o peso:
| Motor | Peso | Total |
| :------------------------------: | :---------------------: | :--------: |
| Chihai CHF-GM12-N20VA 350 rpm | 14,5 g | 122,5 g |
| Chihai,CHF-GM12-N20VA 210 rpm | 14,5 g | 122,5 g |
| Pololu 250 rpm | 9,5 g +0,7g (encoder) | 118,2 g |
| DFRobot FIT0482 310 rpm | 18,14 g | 126,14 g |
| Pololu 625 rpm,50:1 | 9,5 g +0,7g (encoder) | 118,2 g |
| Pololu 400 rpm 75:1 | 9,5 g +0,7g (encoder) | 118,2 g |
| Pololu,320 rpm 100:1 | 9,5 g +0,7g (encoder) | 118,2 g |
Teve um erro quando fiz as contas no excel de graus e radianos, segue a tabela com os valores corrigidos.
Tabela:
| Motor | Velocidade máxima (raio de 30 mm) | Torque máximo | Resolução do encoder / motor | Resolução do encoder / roda (pós redução) | Resolução do encoder ângulo do robô,(1:1,66) | Resolução de um chute a 1m | Dimensões em mm (LxCxA) | Preço |
| :------------------------------: | :---------------------------------: | :-------------: | :------------------------------: | :--------------------------------------------: | :----------------------------------------------: | :----------------------------: | :------------------------: | :----------------------------------------: |
| Chihai CHF-GM12-N20VA 350 rpm | 1,09 m/s | 0,3kg.cm | 7 ppr | 210 ppr | 180,10 ppr | 0,0351 | 12,2 x 42,7 x 18,5 | 36,27 reais |
| Chihai CHF-GM12-N20VA 210 rpm | 0,659 m/s | 0,5kg.cm | 7 ppr | 350 ppr | 300,17 ppr | 0,0209 | 12,2 x 42,7 x 18,5 | 36,27 reais |
| Pololu 250 rpm | 0,78 m/s | 0,5 Kg.cm | 12 ou 20 ppr | 600 ou 1000 ppr | 514,58 ou 857,63 ppr | 0,0122 ou 0,0073 | 12 x 40,1 x 10 | 16,95 dólares + 4,475 dólares (encoder) |
| DFRobot FIT0482 310 rpm | 0,97 m/s | 0,8 kg.cm | 14 ppr | 700 ppr | 600,34 ppr | 0,0104 | 10 x 42,2 x 14,5 | 12 dólares |
| Pololu 625 rpm 50:1 | 1,96 m/s | 1,1 kg.cm | 12 ou 20 ppr | 600 ou 1000 ppr | 514,58 ou 857,63 ppr | 0,0122 ou 0,0073 | 12 x 40,1 x 10 | 15,95 dólares + 4,475 dólares (encoder) |
| Pololu 400 rpm 75:1 | 1,26 m/s | 1,6 kg.cm | 12 ou 20 ppr | 900 ou 1500 ppr | 771,87 ou 1286,45 ppr | 0,0081 ou 0,0048 | 12 x 40,1 x 10 | 15,95 dólares + 4,475 dólares (encoder) |
| Pololu 320 rpm 100:1 | 1,01 m/s | 2,2 kg.cm | 12 ou 20 ppr | 1200 ou 2000 ppr | 1029,16 ou 1715,27 ppr | 0,0061 ou 0,0037 | 12 x 40,1 x 10 | 15,95 dólares + 4,475 dólares (encoder) |
Atualizado por João Bacelar há mais de 8 anos
O peso base do robô foi calculado de seguinte maneira. Anteriormente usei um valor aproximado somente para as peça, tendo como base o modelo do ITA. Agora segue descrição dos componentes:
- peças 131,1 g
- eletrônica 28g
- bateria 45,36 g
- rodas (2 rodas pololu de modelo) 28,35g
Os valores de aceleração foram obtidos através do torque e usando roda de raio 30 mm.
Tabela com os valores:
| Motor | Peso | Total | Torque kg.cm | Aceleração (m/s^2) | Tempo para percorrer 1 metro (em s) |
| :------------------------------: | :---------------------: | :--------: | :------------: | :------------------: | :-----------------------------------: |
| Chihai CHF-GM12-N20VA 350 rpm | 14,5 g | 261,81g | 0,3 | 0,763913 | 1,618054 |
| Chihai,CHF-GM12-N20VA 210 rpm | 14,5 g | 261,81 g | 0,5 | 1,273188 | 1,25334 |
| Pololu 250 rpm | 9,5 g +0,7g (encoder) | 253,21 g | 0,5 | 1,31643 | 1,232583 |
| DFRobot FIT0482 310 rpm | 18,14 g | 269,09 g | 0,8 | 1,981989 | 1,004533 |
| Pololu 625 rpm,50:1 | 9,5 g +0,7g (encoder) | 253,21 g | 1,1 | 2,896147 | 0,831007 |
| Pololu 400 rpm 75:1 | 9,5 g +0,7g (encoder) | 253,21 g | 1,6 | 4,212577 | 0,689035 |
| Pololu,320 rpm 100:1 | 9,5 g +0,7g (encoder) | 253,21 g | 2,2 | 5,792294 | 0,587611 |
Atualizado por Luiz Renault Leite Rodrigues há mais de 8 anos
Excelente análise comparativa.
Já fizeram a seleção do melhor motor?
Atualizado por João Bacelar há mais de 8 anos
Luiz Renault Leite Rodrigues escreveu:
Excelente análise comparativa.
Já fizeram a seleção do melhor motor?
Optamos pelo Pololu 1:75 de 400 rpm, e encode óptico da Pololu para 3,3V.
Na questão entre o encoder óptico ou magnético optamos pelo óptico por já ser usado por outra equipes e pelo o problema de interferência devido à proximidade dos encoderes, dado o tamanho reduzido do robô, já ter uma solução usada por elas: uma divisão fina entre os motores na cor preta.
Não saberíamos o comportamento do encoder magnético de imediato à próximas distâncias.
Atualizado por João Bacelar há mais de 8 anos
- Situação alterado de Em andamento para Feedback
Atualizado por Efísio Alves há mais de 8 anos
- Situação alterado de Feedback para Fechada
Os motores já chegaram.