Atividade #1409
AbertaDesenvolvimento da PCB modelo FF21
Descrição
- Aumento para 12 motores sendo 4 deles MX-28T
- Correção do regulador 5V.
- Fabricação na PCBWay
Arquivos
Atualizado por Gabriel Lima há quase 5 anos
- Arquivo Placa_FF20.png Placa_FF20.png adicionado
- Arquivo Placa_FF21.png Placa_FF21.png adicionado
Placa do robô de 2020
Placa do robô de 2021
Atualizado por Gabriel Lima há quase 5 anos
- Aumento do tamanho da placa para caber uma maior quantidade de conectores
- Troca do conector P1 por um com mais pinos
- Trilhas de comunicação movidas para o top layer, deixando a bottom mais livre para condução do GND
Atualizado por Gabriel Lima há quase 5 anos
- Troca do regulador de 5V TPS566231RQFR por LMZ23605TZ, devido a dificuldades de obtenção do primeiro e sua bobina associada e a possibilidade de obtenção do segundo do estoque da IMBEL.
- O do ano passado suportava 6A de corrente, nesse ano foram utilizados dois de 5A cada. Um deles alimenta o Raspberry Pi e os sensores e o outro alimenta os servos 9G. Isso evita com que picos de corrente gerados pelo servo no início de seu movimento provoquem brownouts no Raspberry e nos sensores.
- O novo regulador tem bobina interna ao IC e não tem necessidade de uma externa.
Atualizado por Gabriel Lima há quase 5 anos
- Foi corrigido o posicionamento dos elementos do silk screen.
Atualizado por LUCAS MACHADO COUTO BEZERRA há quase 5 anos
link do github (HRR-Hardware):
https://github.com/roboime/HRR-Hardware
Atualizado por Gabriel Lima há quase 5 anos
- Arquivo Diagrama_2021.png Diagrama_2021.png adicionado

Atualizado por LUCAS MACHADO COUTO BEZERRA há quase 5 anos
- Arquivo WhatsApp Image 2021-08-06 at 14.31.42.jpeg adicionado
- Arquivo WhatsApp Image 2021-08-06 at 14.31.14.jpeg adicionado
- Arquivo WhatsApp Image 2021-08-06 at 14.30.17.jpeg adicionado
- Arquivo WhatsApp Image 2021-08-06 at 14.29.16.jpeg adicionado
- Arquivo WhatsApp Image 2021-08-06 at 14.26.12.jpeg adicionado
- Arquivo WhatsApp Image 2021-08-06 at 14.24.23.jpeg adicionado
Atualizado por LUCAS MACHADO COUTO BEZERRA há quase 5 anos
- Arquivo excluído (
WhatsApp Image 2021-08-06 at 14.31.14.jpeg)
Atualizado por LUCAS MACHADO COUTO BEZERRA há quase 5 anos
- Arquivo excluído (
WhatsApp Image 2021-08-06 at 14.31.42.jpeg)
Atualizado por LUCAS MACHADO COUTO BEZERRA há quase 5 anos
- Arquivo excluído (
WhatsApp Image 2021-08-06 at 14.30.17.jpeg)
Atualizado por LUCAS MACHADO COUTO BEZERRA há quase 5 anos
- Arquivo excluído (
WhatsApp Image 2021-08-06 at 14.26.12.jpeg)
Atualizado por LUCAS MACHADO COUTO BEZERRA há quase 5 anos
- Arquivo excluído (
WhatsApp Image 2021-08-06 at 14.29.16.jpeg)
Atualizado por LUCAS MACHADO COUTO BEZERRA há quase 5 anos
- Arquivo excluído (
WhatsApp Image 2021-08-06 at 14.24.23.jpeg)
Atualizado por LUCAS MACHADO COUTO BEZERRA há quase 5 anos
- Arquivo WhatsApp Image 2021-08-06 at 14.31.42.jpeg adicionado
Atualizado por LUCAS MACHADO COUTO BEZERRA há quase 5 anos
- Arquivo excluído (
WhatsApp Image 2021-08-06 at 14.31.42.jpeg)
Atualizado por LUCAS MACHADO COUTO BEZERRA há quase 5 anos
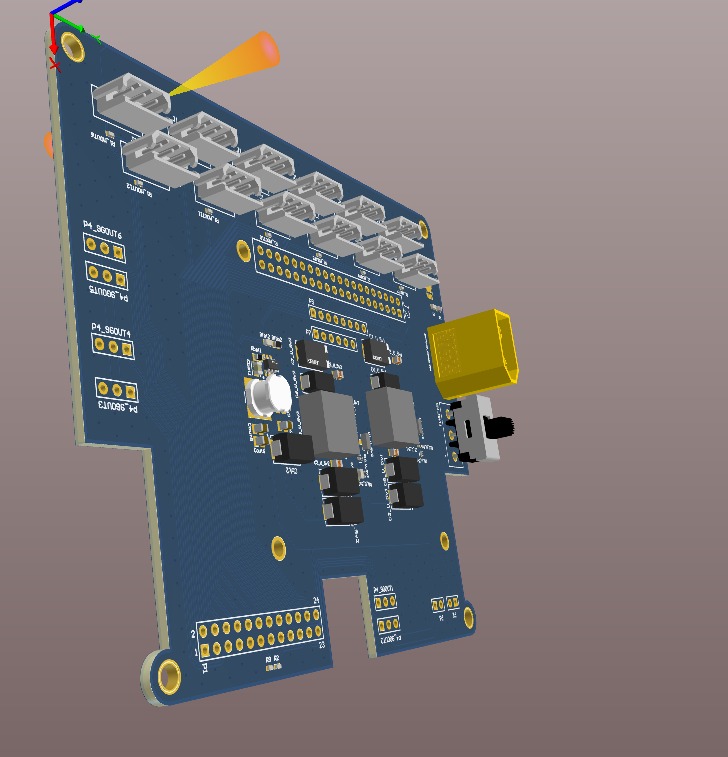
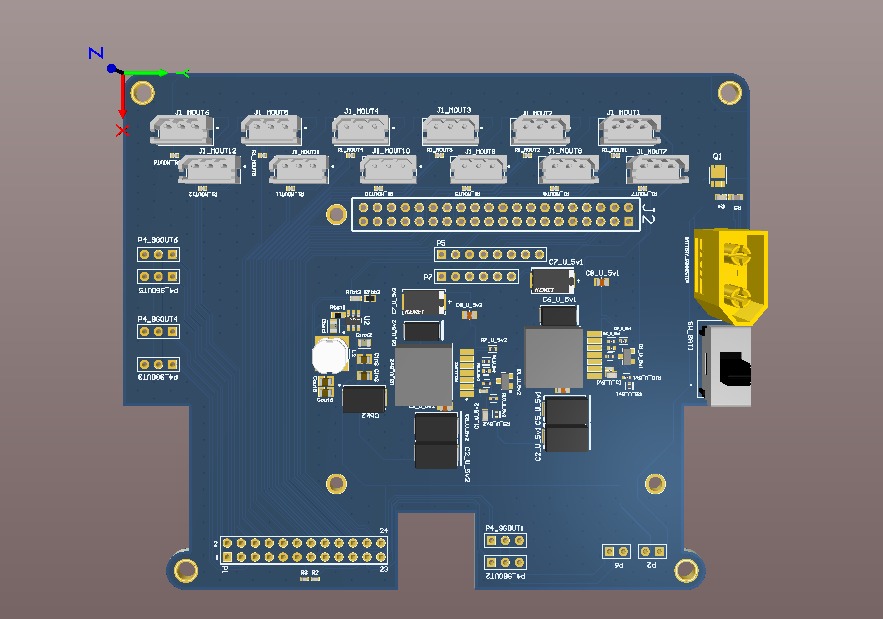
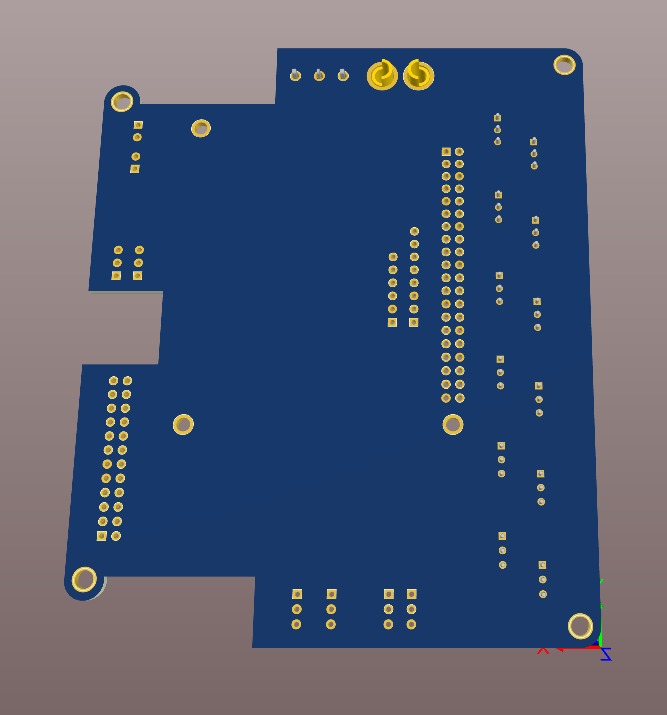
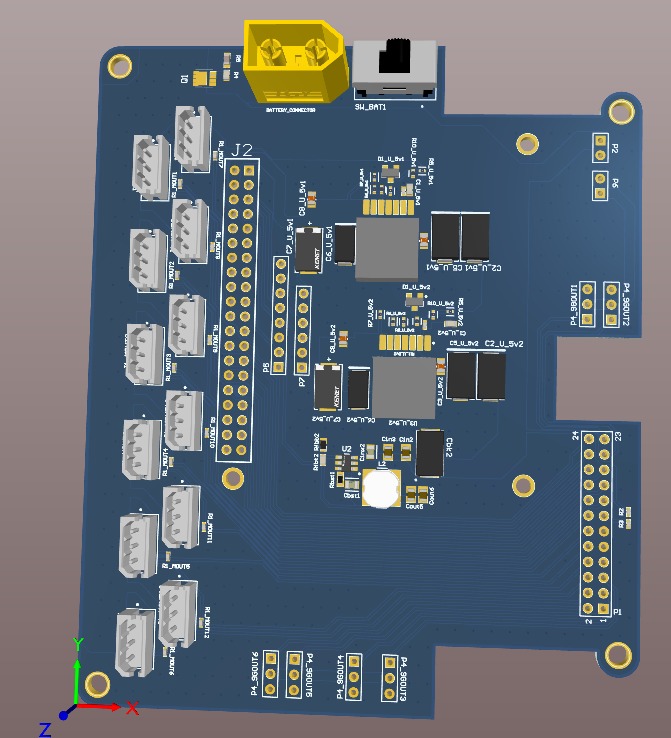
- Arquivo visao3d1.jpeg visao3d1.jpeg adicionado
- Arquivo visao3d2.jpeg visao3d2.jpeg adicionado
- Arquivo visao3d3.jpeg visao3d3.jpeg adicionado
- Arquivo visao3d4.jpeg visao3d4.jpeg adicionado
- Arquivo visao3d5.jpeg visao3d5.jpeg adicionado
- Arquivo visao3d6.jpeg visao3d6.jpeg adicionado
Visões 3D da placa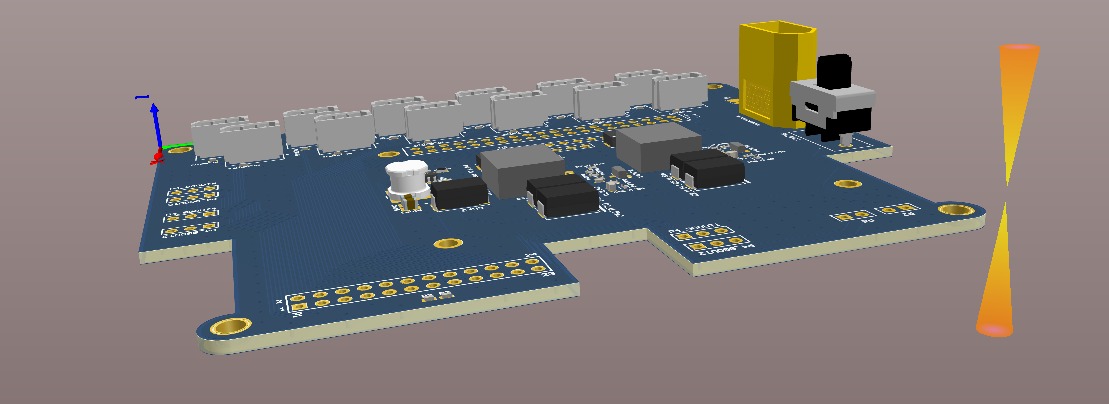

Atualizado por LUCAS MACHADO COUTO BEZERRA há quase 5 anos
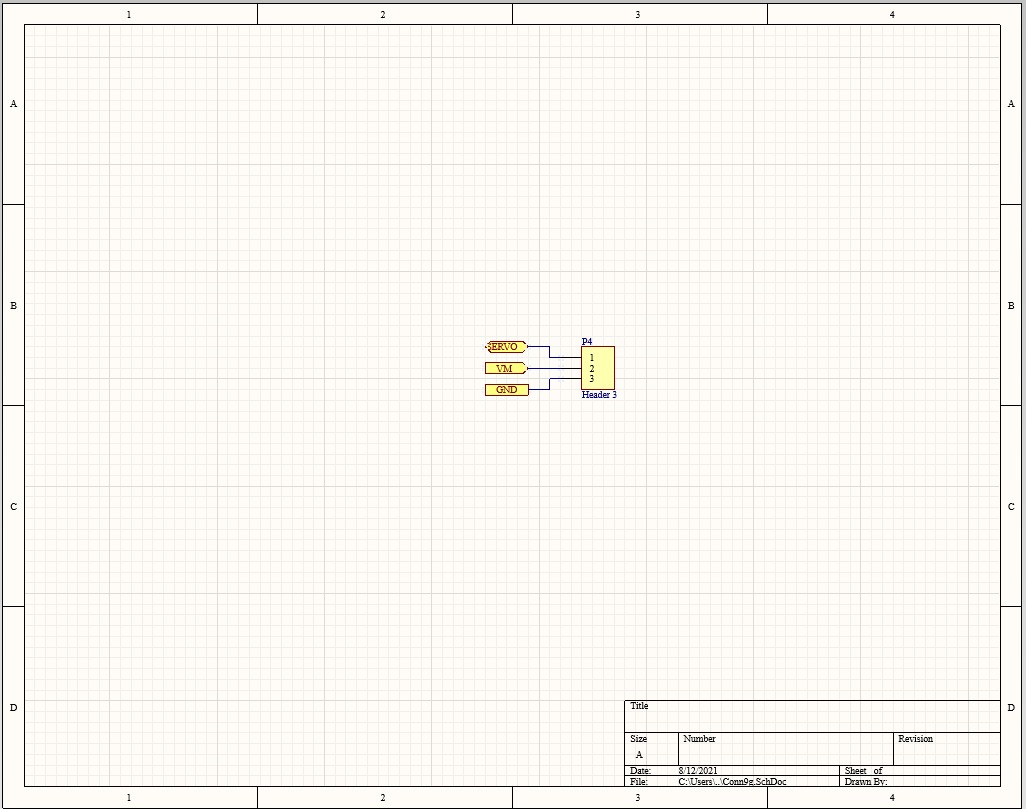
- Arquivo CONN9G.jpeg CONN9G.jpeg adicionado
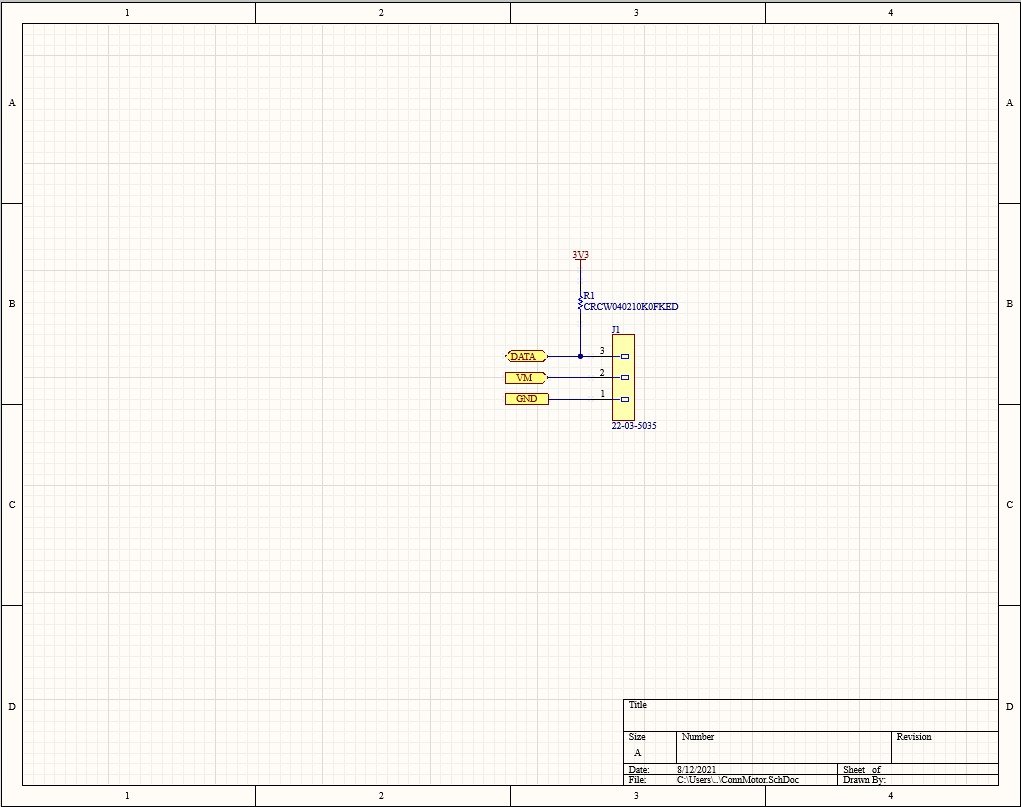
- Arquivo CONNMOTOR.jpeg CONNMOTOR.jpeg adicionado
- Arquivo PSB.jpeg PSB.jpeg adicionado
- Arquivo REGULADOR3v3.jpeg REGULADOR3v3.jpeg adicionado
- Arquivo REGULADOR5V.jpeg REGULADOR5V.jpeg adicionado
ESQUEMÁTICOS
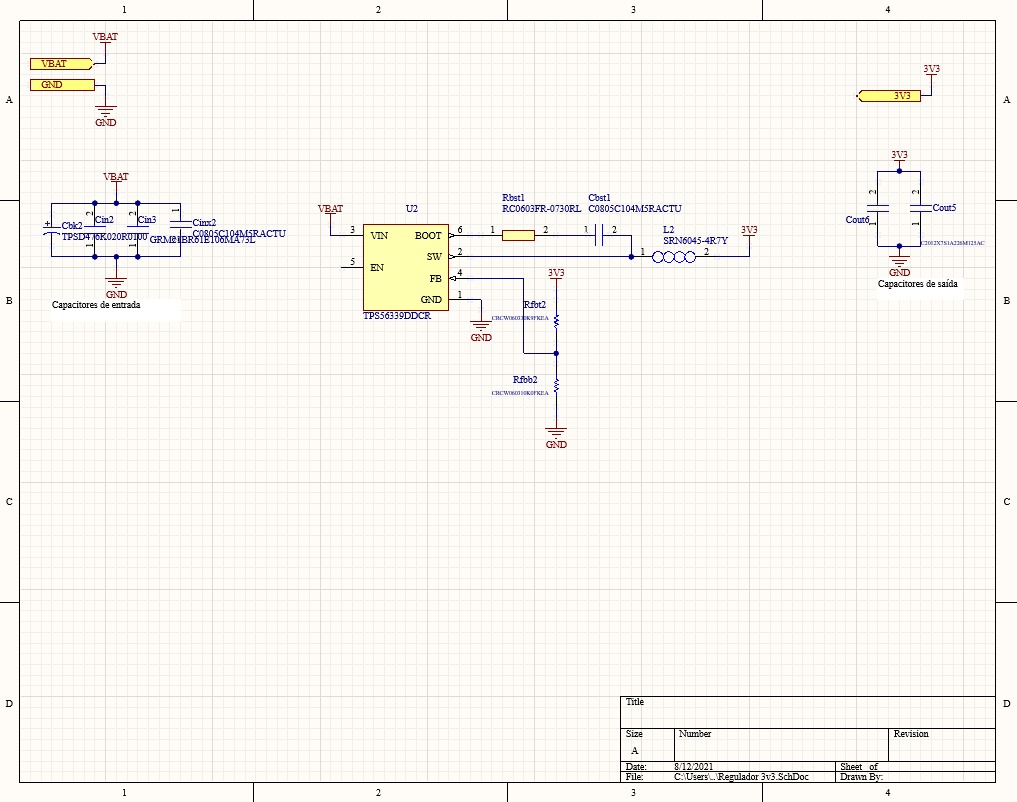
O objetivo do regulador de 3v3 é diminuir a tensão de entrada para uma tensão de 3v3.
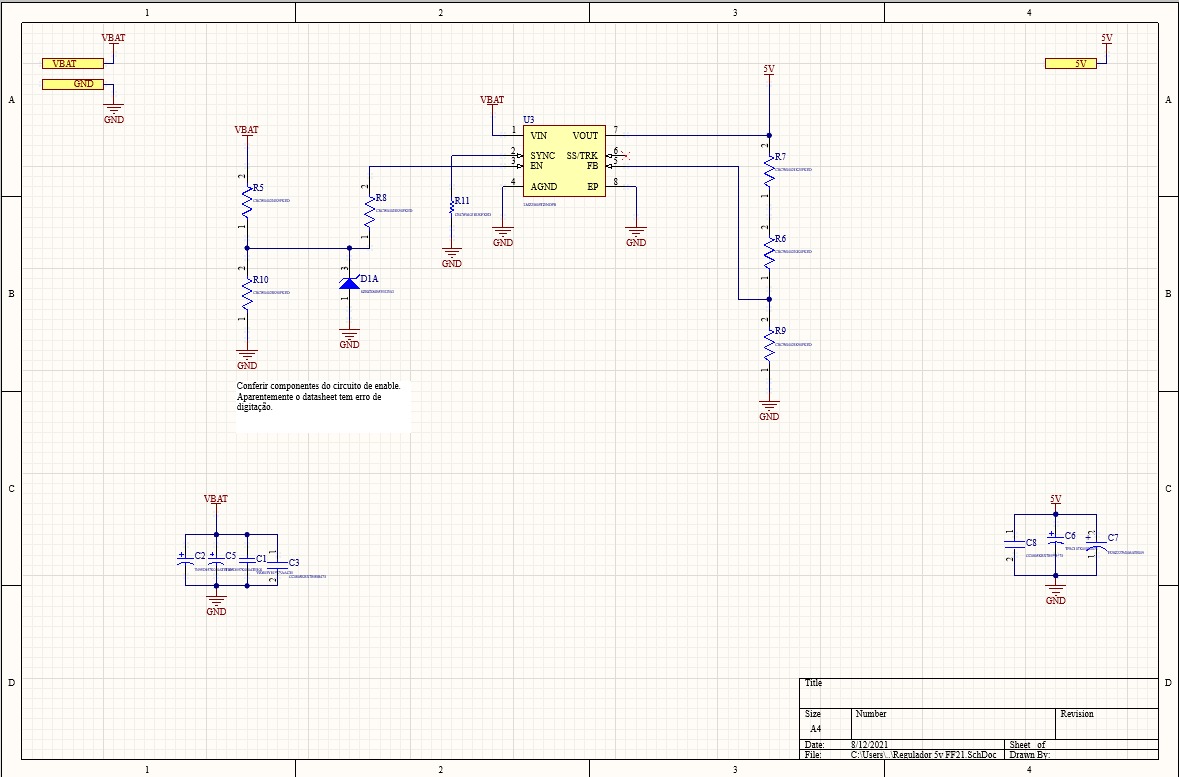
O objetivo do regulador de 5v é diminuir a tensão de entrada para uma tensão de 5v.
O objetivo do regulador de 3v3 é diminuir a tensão de entrada para uma tensão de 3v3.
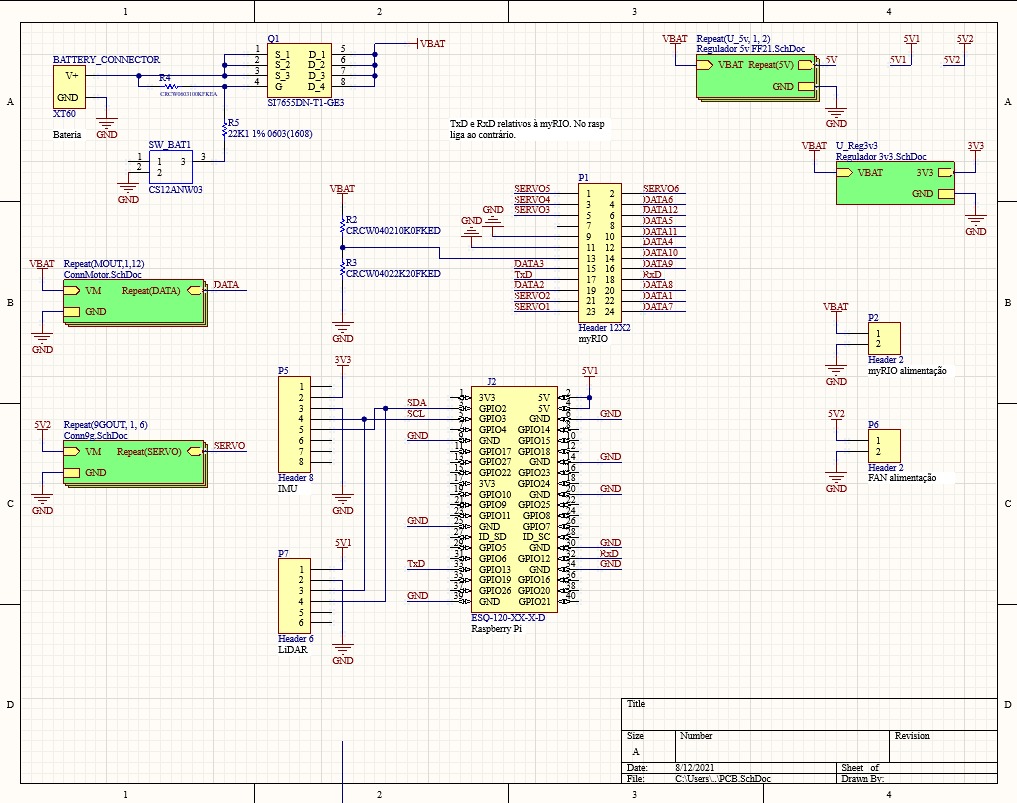
Desse modo, o objetivo do uso da placa (PCB) é fazer a conexão entre todos os periféricos as unidades de processamento. Isto é, a placa será alimentada por uma bateria, que passará por um MOSFET para chaveamento do circuito. Em seguida os reguladores de tensão diminuirão a tensão para as requeridas pelos sensores IMU (3v3), LiDAR (5v), Raspberry Pi (5v), os 6 motores SG90 (5v). Além disso, a placa também alimentará a myRIO e os 12 motores Dynamixel.
Atualizado por Paulo H C Martins há quase 5 anos
- Arquivo Bill_of_Materials_HRR.xlsx Bill_of_Materials_HRR.xlsx adicionado
- Situação alterado de Em andamento para Resolvida
- Atribuído para ajustado para Paulo H C Martins
Bill of Materials1
Atualizado por LUCAS MACHADO COUTO BEZERRA há quase 5 anos
- Arquivo lmz23605_datasheet5v.pdf lmz23605_datasheet5v.pdf adicionado
- Arquivo tps56339_datasheet3v3.pdf tps56339_datasheet3v3.pdf adicionado
- Situação alterado de Resolvida para Em andamento
- Atribuído para excluído (
Paulo H C Martins)
DATASHEET dos reguladores de tensão
Atualizado por Gabriel Lima há quase 5 anos
- Adição de um resistor de 0 ohms para colocar os reguladores de tensão de 5v em paralelo
- Aumento da largura da trilha dos servos SG90 para 3mm
- Mudança dos resistores de pull-up das linhas de comunicação com motores Dynamixel para perto do conector que vai para a myRIO
- Plano de VBAT cobrindo as entradas dos 12 conectores dos Dynamixel