Atividade #1040
AbertaAnalise da dinâmica longitudinal do robô
Descrição
Com a mudança do sistema de transmissão do robô foi levantado um estudo da dinâmica do robô para verificar a viabilidade do mesmo.
Principais objetivos:
Determinar se o sistema de transmissão atual está bem dimensionado.
Determinar a redução ideal nas rodas omnis
Arquivos
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Atualizado por Luis David Peregrino de Farias há mais de 7 anos
- Arquivo Dados de inércia.pdf Dados de inércia.pdf adicionado
- Arquivo picture454-1.png picture454-1.png adicionado
- Arquivo picture454-2.png picture454-2.png adicionado
- Arquivo picture454-3.png picture454-3.png adicionado
- Arquivo picture454-4.png picture454-4.png adicionado
- Arquivo picture454-5.png picture454-5.png adicionado
- Geometria do problema:
---------------------------------
Desempenho do motor:
A curva utilizada foi a do torque fornecido pelo motor para as diversas rotações(vale ressaltar que se deve ajustar os valores para o motor sem caixa de redução)
---------------------------------
Dados do robô(utilizado da robocup 2018):
PDF ANEXO
---------------------------------
Matrizes para robô omni com 4 rodas e assimétricas:
A ideia do programa é que se partindo do repouso o robô sendo alimentado por ddp máxima nos 4 motores(situação que ele segue a curva de torque exposta no datasheet) vai apresentar forças trativas em cada roda que começa acelerar o robô seguindo o equacionamento matricial exposto. Com o tempo a velocidade do robô aumenta assim como as velocidades de rotação dos motores, situação que faz o motor fornecer menos torque, até que as este atinge sua velocidade máxima limitada pela velocidade máxima que os motores podem atingir ou que o torque é igual a 0.
Atualizado por Luis David Peregrino de Farias há mais de 7 anos
- Arquivo picture960-1.png picture960-1.png adicionado
- Programa desenvolvido:
Script matlab: (Input de Dados)
`clc
close all
clear all
R=0.0761; %distância das rodas ao centro do robô
Iy=0.00767; %momento de inércia no eixo vertical
M=2.17; %massa do robô
alpha=Iy/(M*R^2); %parâmetro de calculo
Theta1=30*pi/180; %angulos das posiçôes dos omnis
Theta2=30*pi/180;
Theta3=45*pi/180;
Theta4=45*pi/180;
r=0.0283; %raio da roda omni
C_alpha=[-sin(Theta1) -sin(Theta2) sin(Theta3) sin(Theta4) %matriz de aceleração
cos(Theta1) -cos(Theta2) -cos(Theta3) cos(Theta4)
1/(alpha*R) 1/(alpha*R) 1/(alpha*R) 1/(alpha*R)]/M;
D=[-sin(Theta1) cos(Theta1) R %matriz de relação cinemática
-sin(Theta2) -cos(Theta2) R
sin(Theta3) -cos(Theta3) R
sin(Theta4) cos(Theta4) R];
max_rpm=8750; %máximo rpm que pode ser atingido pelo motor
max_torque=8.4*9.81*0.01/50; %máximo torque (para rpm=0)
N=8; %Redução nas engrenagens
`
Simulink:
Atualizado por Luis David Peregrino de Farias há mais de 7 anos
- Arquivo picture856-1.png picture856-1.png adicionado
- Arquivo picture856-2.png picture856-2.png adicionado
- Arquivo picture856-3.png picture856-3.png adicionado
- Resultados:
Gráfico V(t)
Robô atinge velocidade de 3 m/s em 0.8 seg e uma velocidade máxima de 3.743 m/s em 1.5 seg. A velocidade máxima não está muito longe da velocidade de 4m/s (máxima permitida pela competição), mostrando que não é vantagem para o projeto uma demasiada perca de redução para obter velocidade máxima maiores, pois isso resultaria em uma menor aceleração e passaria dos 4m/s máximos.
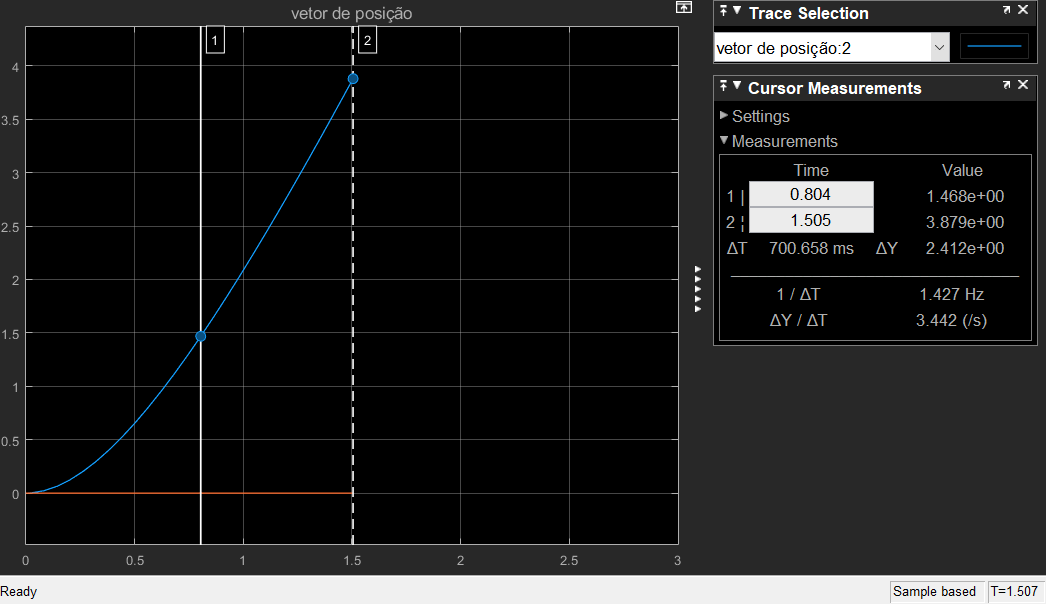
Gráfico X(t)
Robô atinge velocidade de 3 m/s após percorrer 1.46m e uma velocidade máxima de 3.743 m/s após percorrer 3.88m.
Gráfico de rpm(t)
Motores da frente ficam em rotações mais elevadas nessa situação.
Atualizado por Luis David Peregrino de Farias há mais de 7 anos
Conclusão
Ao meu ver os esforços poderiam ser em aumentar um pouco a velocidade máxima, porém tentar ao máximo reduzir massa do motor. Já que não existe a possibilidade orçamentária e técnica(caso o motor seja de outro tipo ou com outra voltagem se não 7.4v) de se trocar por um outro motor que fosse mais potente. Continuando nessa questão orçamentária, seriam gastos cercas de 1700 reais para comprar engrenagem pra todos os robôs. Assim foi decidido utilizar uma engrenagem de 40 dentes que vem na caixa de redução do motor, de modo que precisaríamos de apenas mais 10 para completar 8 robôs. Porém essa mudança causa uma excessiva perca de redução, fato que deve ser compensado com a diminuição do tamanho da roda para se obter a mesma aceleração. Além disso a redução da roda causa diminuição da massa total e do seu próprio momento de inércia(que deve ser levado em conta no modelo para uma simulação mais completa) de modo que o resultado é ainda um pouco mais pessimista do que o encontrado em termos de aceleração do robô.
Com base nesses pontos argumentados já estão sendo feitas mudanças do robô a fim de reduzir massa e proponho um protótipo em plástico, tendo em vista a dupla contribuição da massa do omni para inércia do robô. E a experiência que tive com os robôs das antigas gerações que possuíam a roda em plástico e essas nunca quebraram(o problema estava na engrenagem de plástico e não a na roda omni em si).
Além disso foi solicitado uma curva do x(t) do robô em campo quando mandado um comando de velocidade pro robô(no modo elô mec teste, onde não é feito controle por parte da Intel). Afim de comparar o modelo teórico com o que é encontrado na prática.